三菱FX3U PID恒速控制变频器实例:打造稳定闭环调速系统
三菱FX3U PID恒速控制变频器实例 编码器测电机转速,当负载变化引起转速变化,PLC PID模拟量控制变频器达到指定转速,形成闭环控制,控制稳定,亲测可用。 内容包含plc和触摸屏程序和教程。
在自动化控制领域,确保电机在不同负载下稳定运行于指定转速是一项关键任务。今天就和大家分享一个基于三菱FX3U PLC实现PID恒速控制变频器的实例,利用编码器测量电机转速,形成闭环控制,应对负载变化。
1. 整体控制思路
通过编码器实时监测电机转速,将转速反馈给PLC。当负载变化导致电机实际转速偏离指定转速时,PLC利用PID算法进行运算,通过模拟量输出调节变频器的频率,进而控制电机转速回到指定值,实现闭环稳定控制。
2. PLC程序编写
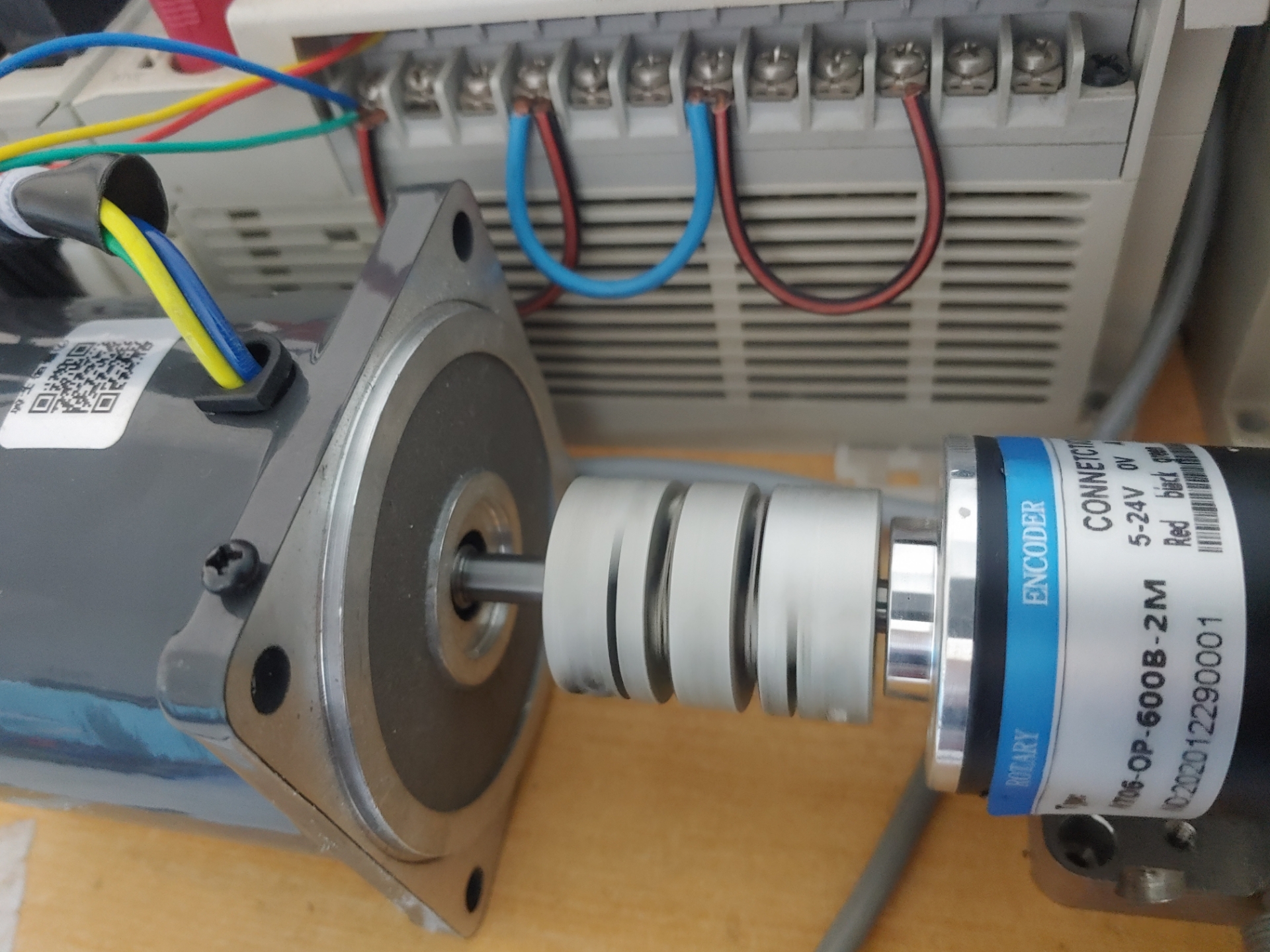
2.1 编码器信号处理
在三菱FX3U中,我们可以利用高速计数器来处理编码器信号。比如,如果编码器连接到X0、X1端子(AB相编码器),可以使用如下指令进行高速计数器初始化:
LD M8000
MOV K1 C251 // 将高速计数器C251设置为16位增计数模式,对应X0、X1输入这里,通过MOV指令将K1传送给C251,设定其工作模式。C251会对编码器输入的脉冲进行计数,以此来反映电机的转速。
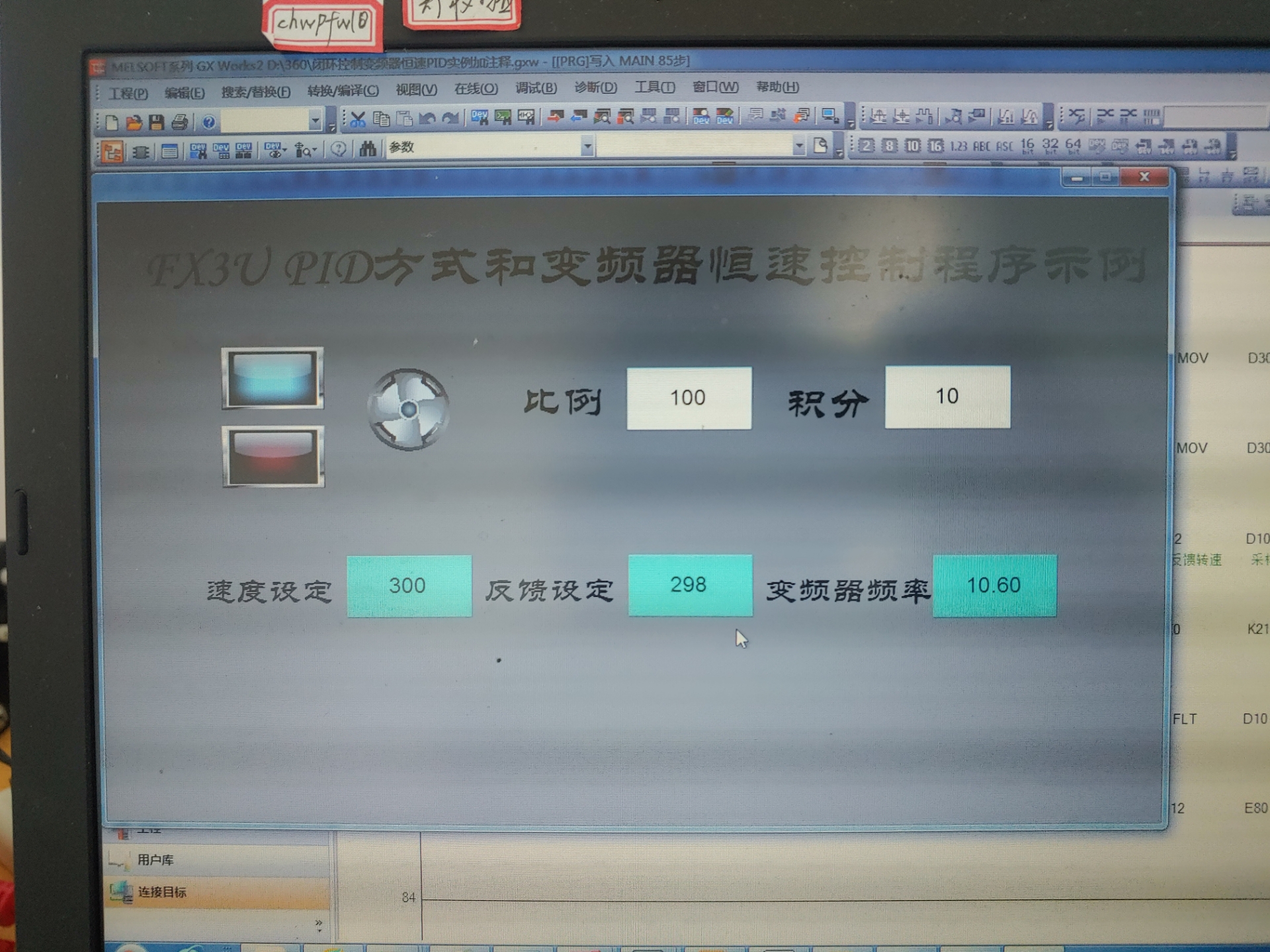
2.2 PID控制算法实现
三菱FX3U内置了PID指令,使用起来较为方便。假设我们的设定转速存储在D100,实际转速反馈值存储在D102(来自高速计数器换算后的值),PID运算结果输出到D104(用于控制模拟量输出),则可以这样编写PID程序:
LD M8000
PID D100 D102 D104 K100 K1000 K1000 K0 // 调用PID指令这里,第一个参数D100是设定值,第二个D102是反馈值,第三个D104是输出值。后面的K100、K1000、K1000分别是比例系数、积分时间、微分时间,根据实际情况进行调整。K0表示无偏移量。在实际应用中,可能需要多次试验这些参数,以达到最佳的控制效果。比如,如果发现系统响应过快,出现超调,可以适当增大积分时间,让系统更加平稳。
2.3 模拟量输出控制变频器
三菱FX3U一般搭配模拟量输出模块,如FX3U - 2DA。假设模拟量输出模块占用通道为CH1,将PID运算结果D104转换为0 - 10V(对应变频器0 - 50Hz频率范围)输出到变频器:
LD M8000
MOV D104 D200 // 将PID运算结果传送到D200
FROM K0 K1 D200 K1 // 将D200的值传送到模拟量输出模块CH1这里,先将PID运算结果D104传送到D200,再通过FROM指令将D200的值传送到模拟量输出模块的CH1通道,实现对变频器频率的控制。
3. 触摸屏程序设计
3.1 界面布局
触摸屏界面要设计简洁明了,包含转速设定值输入框、实际转速显示区、运行/停止按钮等元素。在威纶通触摸屏软件中,新建一个窗口,在窗口中添加数值输入元件,关联PLC中的D100寄存器,用于设定转速。再添加数值显示元件,关联D102寄存器,实时显示电机实际转速。最后添加按钮元件,关联PLC的控制继电器,实现电机的运行与停止控制。
3.2 数据交互设置
为了保证触摸屏与PLC之间数据的实时准确交互,需要正确设置通信参数。比如使用RS485通信方式时,在触摸屏软件的系统参数设置中,设置波特率、数据位、停止位等参数与PLC的通信设置一致。例如,波特率设置为9600bps,数据位8位,停止位1位,无奇偶校验。这样,操作人员就可以通过触摸屏方便地对系统进行监控和操作。
4. 总结
通过上述PLC和触摸屏程序的设计,我们成功实现了基于三菱FX3U的PID恒速控制变频器系统。这个闭环控制系统能够有效应对负载变化,保持电机稳定运行在指定转速。在实际调试过程中,要注意参数的优化调整,比如PID参数以及编码器与转速的换算关系等,确保系统达到最佳性能。希望这个实例能为大家在自动化控制项目中提供一些参考和帮助。
三菱FX3U PID恒速控制变频器实例 编码器测电机转速,当负载变化引起转速变化,PLC PID模拟量控制变频器达到指定转速,形成闭环控制,控制稳定,亲测可用。 内容包含plc和触摸屏程序和教程。

Agent 垂直技术社区,欢迎活跃、内容共建。
更多推荐



 8
8 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)