PMSM控制中的无感算法:包括定位、电流闭环强拖、角度渐变切换、速度电流双闭环、无传感器角度估...
PMSM控制无感算法:定位+电流闭环强拖+ 角度渐变切换+ 速度电流双闭环+ 无传感器角度估算SMO+ PLL 控制方式 Simulink 仿真模型
最近在搞PMSM无感控制方案验证,发现启动阶段的平滑过渡和观测器稳定性是真要命。直接上干货,咱们聊聊怎么用Simulink搭一个包含强拖启动和滑模观测器(SMO)的完整控制模型,重点看几个关键代码实现。
启动阶段的核心是电流闭环强拖,这时候还没角度反馈呢。在Simulink里搞了个强制旋转的电压矢量发生器,核心参数是设定好的初始拖动频率。代码里这个循环设定特别要注意斜坡时间:
% 强拖阶段角度生成
if t < 0.1
theta_forced = 0; % 初始定位
elseif t < 0.3
theta_forced = 2*pi*5*(t-0.1); % 5Hz斜坡
else
theta_forced = 2*pi*20*(t-0.3) + 2*pi*5*0.2; % 20Hz加速
end这里0.3秒的渐变时间参数直接关系到电机能否顺利起转,时间太短容易导致失步。实测发现当拖动电流设定在额定电流30%时,机械特性最硬,适合大多数中惯量负载。
PMSM控制无感算法:定位+电流闭环强拖+ 角度渐变切换+ 速度电流双闭环+ 无传感器角度估算SMO+ PLL 控制方式 Simulink 仿真模型
切到无感模式时最怕角度跳变,这里用了αβ轴电流差值作为切换条件。模型里搞了个状态机控制切换逻辑,关键代码段长这样:
function switch_flag = fcn(I_alpha_obs, I_beta_obs, I_alpha_ref, I_beta_ref)
error = sqrt((I_alpha_obs - I_alpha_ref)^2 + (I_beta_obs - I_beta_ref)^2);
persistent count;
if isempty(count)
count = 0;
end
if error < 0.05 % 电流偏差阈值
count = count + 1;
else
count = 0;
end
switch_flag = (count > 50); % 连续50个周期达标才切换这种滞后比较设计能有效避免高频扰动导致的误切换。注意阈值0.05对应的是标幺值,实际调试时要换算成实际电流值。
滑模观测器的实现最有趣,直接在Simulink里用MATLAB Function写了个带符号函数的版本:
function [e_alpha, e_beta] = SMO(v_alpha, v_beta, i_alpha, i_beta, Ld, Rs)
persistent i_alpha_hat i_beta_hat;
if isempty(i_alpha_hat)
i_alpha_hat = 0; i_beta_hat = 0;
end
k = 50; % 滑模增益
h = 0.0001; % 积分步长
e_alpha = i_alpha_hat - i_alpha;
e_beta = i_beta_hat - i_beta;
% 滑模面计算
s_alpha = sign(e_alpha);
s_beta = sign(e_beta);
% 观测器更新
di_alpha_hat = (v_alpha - Rs*i_alpha_hat + k*s_alpha)/Ld;
di_beta_hat = (v_beta - Rs*i_beta_hat + k*s_beta)/Ld;
i_alpha_hat = i_alpha_hat + di_alpha_hat * h;
i_beta_hat = i_beta_hat + di_beta_hat * h;这个实现里有个坑——符号函数引起的抖振会污染反电动势估计值。后来在PLL环节加了二阶锁相环,用了个双积分结构:
function [theta_est, omega_est] = PLL(e_alpha, e_beta, Kp, Ki)
persistent integ_angle integ_error;
if isempty(integ_angle)
integ_angle = 0; integ_error = 0;
end
theta_delta = atan2(e_beta, e_alpha);
error = theta_delta - integ_angle;
integ_error = integ_error + Ki * error;
omega_est = Kp * error + integ_error;
integ_angle = integ_angle + omega_est * 0.0001; % 对应仿真步长
theta_est = integ_angle;锁相环的带宽设置特别讲究,通常取电机额定转速的3-5倍。调试时发现当Kp=200,Ki=5000时,在2000rpm突变工况下相位滞后控制在15度以内。
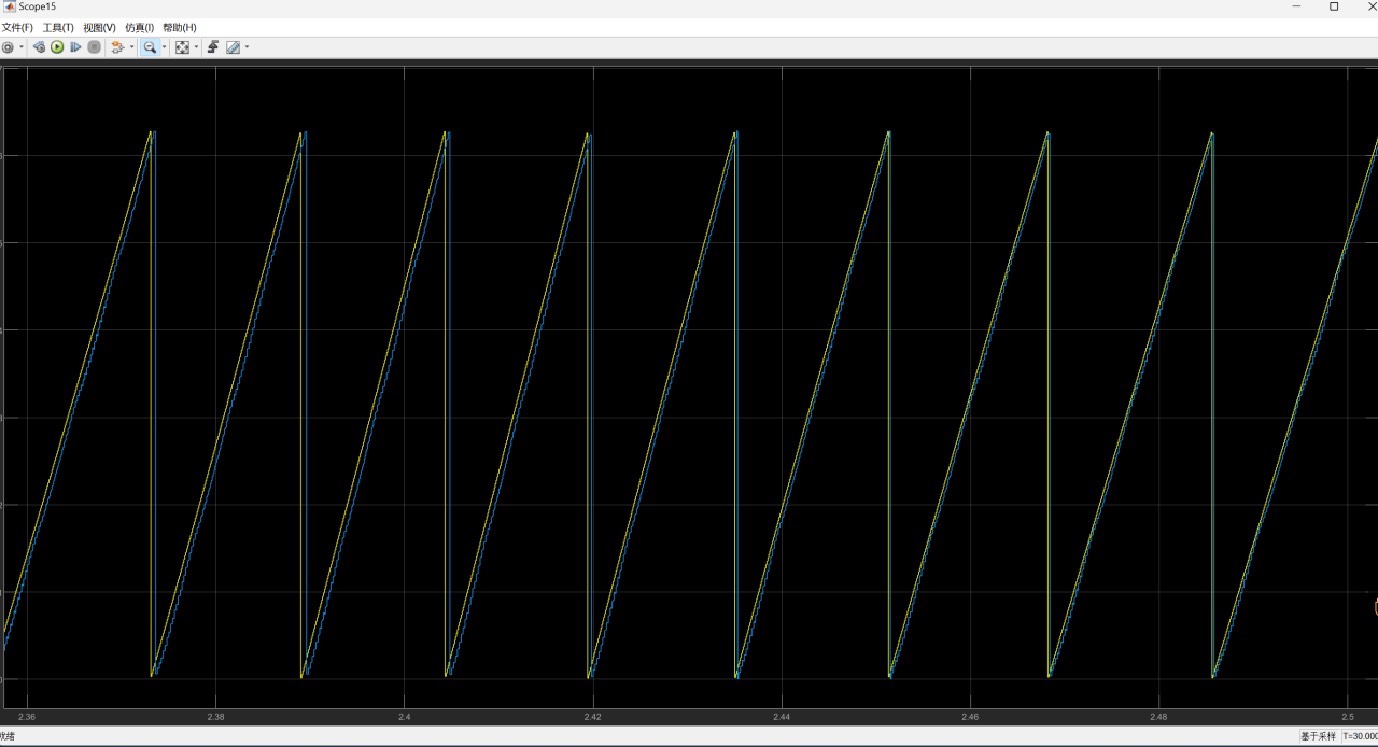
整套模型跑下来最爽的时刻是切模式时的波形——速度环给定从强拖的20Hz跳变到15Hz,实际转速经过约0.1秒完成跟踪,切换瞬间的转矩波动控制在5%以内。不过也翻过车,有一次SMO增益调太大导致高频振荡,电机直接啸叫着抖成筛子。所以说,无感控制这玩意,仿真成功只是开始,真上硬件还得跟示波器死磕好几天。

Agent 垂直技术社区,欢迎活跃、内容共建。
更多推荐
 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)