复盘完近两个月 OpenClaw × 机器人研究,这5大框架值得重点关注!
依托RoboTwin平台,统一仿真环境合成、轨迹生成、模型训练评估三大核心操作,实现从自然语言指令到端到端开发流程的自动转化,支持跨平台、多模型的无缝适配与步骤级验证回退。研究构建了基于OpenClaw运行时、适配ROS 2的模型无关执行层,通过能力发现、观测归一化、执行前验证、审计日志四大核心契约,实现任意基础模型与异构机器人的标准化连接。,依赖实用的反向重置行为构建可用环境,仅在室内桌面整理等

OpenClaw逐步成为智能体通用底层
——意图驱动已成趋势
目录
近两个月,基于 OpenClaw Agent框架的具身智能研究迎来集中突破,围绕长时序任务执行、多机协作、开发范式、硬件适配、记忆增强五大核心痛点,形成一套完整的机器人智能体技术矩阵。
在此行业发展态势下,国内高校与企业持续发力,接连产出 RoboClaw、ABot-Claw、EmbodiedClaw 等一系列极具代表性的前沿成果。
这一系列研究系统性地回答了机器人开发如何实现从 “代码驱动” 向 “意图驱动” 跨越。
因此,本文将按从顶层智能体框架到底层执行层的逻辑,逐篇拆解这五篇文章的核心思路与贡献。
01 可扩展长时序机器人任务的智能体框架
论文题目:RoboClaw: An Agentic Framework for Scalable Long-Horizon Robotic Tasks
发文团队:智元机器人、新加坡国立大学、上海交通大学
研究方法
该研究以VLM为核心控制器,统一数据采集、策略学习与任务执行,通过策略、工具、技能三层架构解耦。
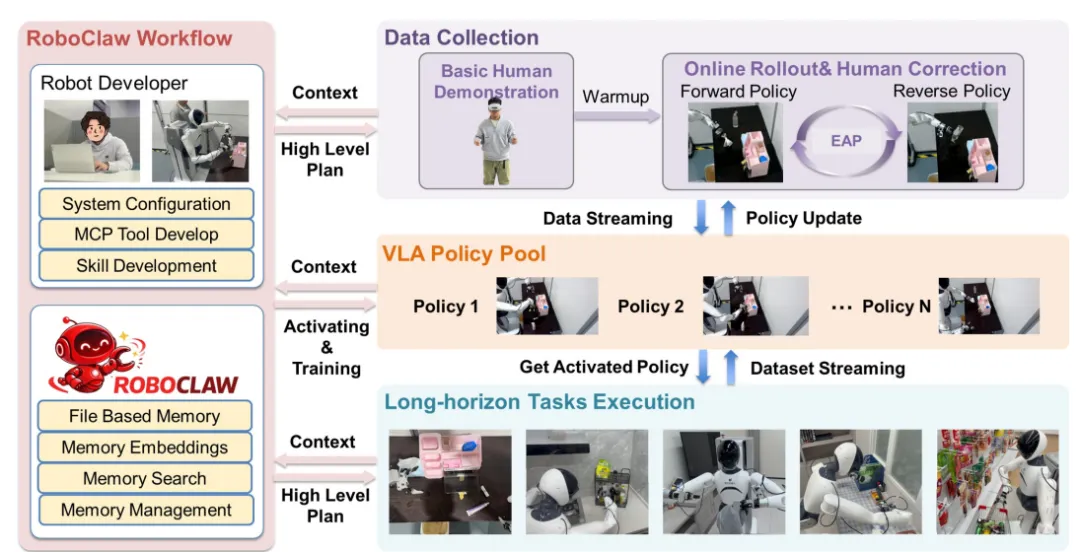
▲RoboClaw 机器人策略全生命周期工作流
1. 全生命周期统一智能体框架
- 打破传统数据收集、学习、执行割裂问题,单一VLM贯穿全流程,保持上下文语义一致。
- 从人工主导转向智能体自主运作,人力时间投入减少53.7%,降低机器人落地成本。
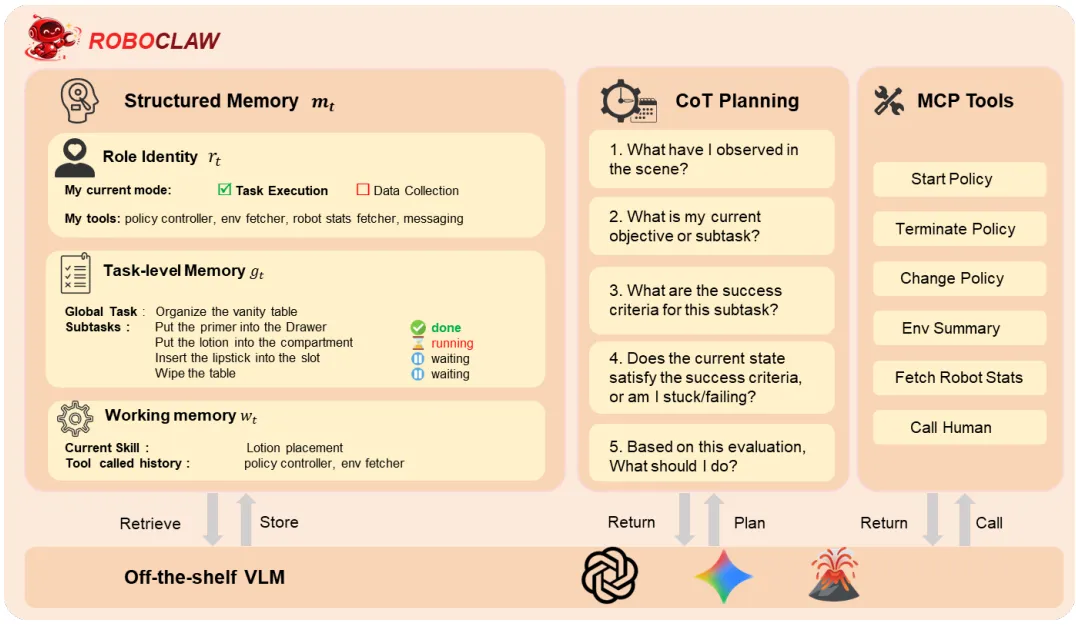
▲RoboClaw 系统架构:VLM 元控制器与结构化记忆
2. 纠缠动作对(EAP)驱动的自主数据采集
- 首创前向-反向动作配对,构建自重置循环,无需频繁人工重置环境。
- 训练数据与部署场景分布对齐,避免域偏移问题,提升策略泛化性。
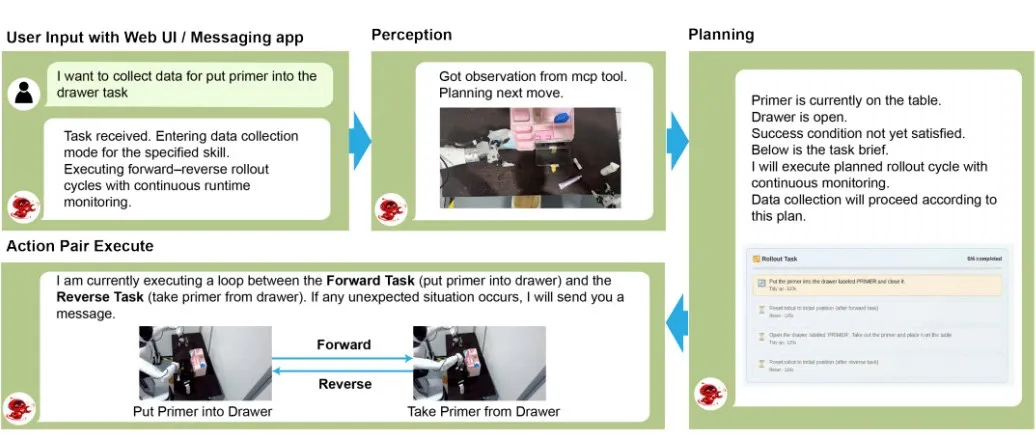
▲RoboClaw 自主数据采集工作流:纠缠动作对循环
3. 长时序任务的动态编排与过程监控
- VLM通过上下文学习推理结构化记忆,动态调度模块化技能,适配复杂长时序任务。
- 实时监控任务进度,自动纠错,长时序任务成功率较基线提升25%。

▲长时序任务执行:智能体规划与技能编排
4. 故障分类学习与闭环迭代
- 区分非退化故障(直接重试)与退化故障(自动学习恢复策略),针对性处理异常。
- 执行轨迹回流训练,持续优化策略、扩充技能库,提升动态环境鲁棒性。

▲四项操作任务反向重置策略成功率
研究局限性
该框架依赖云端大模型存在推理延迟,依赖实用的反向重置行为构建可用环境,仅在室内桌面整理等操作任务验证、场景覆盖有限,未充分适配极端动态环境与多机器人协作场景;
同时缺乏触觉反馈融合能力,动态环境下极端故障与人机混行的安全容错策略也尚不完善。
02 多机协作智能体底座,支撑持久自进化执行
论文题目:ABot-Claw: A Foundation for Persistent, Cooperative, and Self-Evolving Robotic Agents
研究团队:阿里巴巴 AMAP CV Lab
研究方法
基于 OpenClaw 本地运行时进行具身化扩展,采用三层解耦架构:
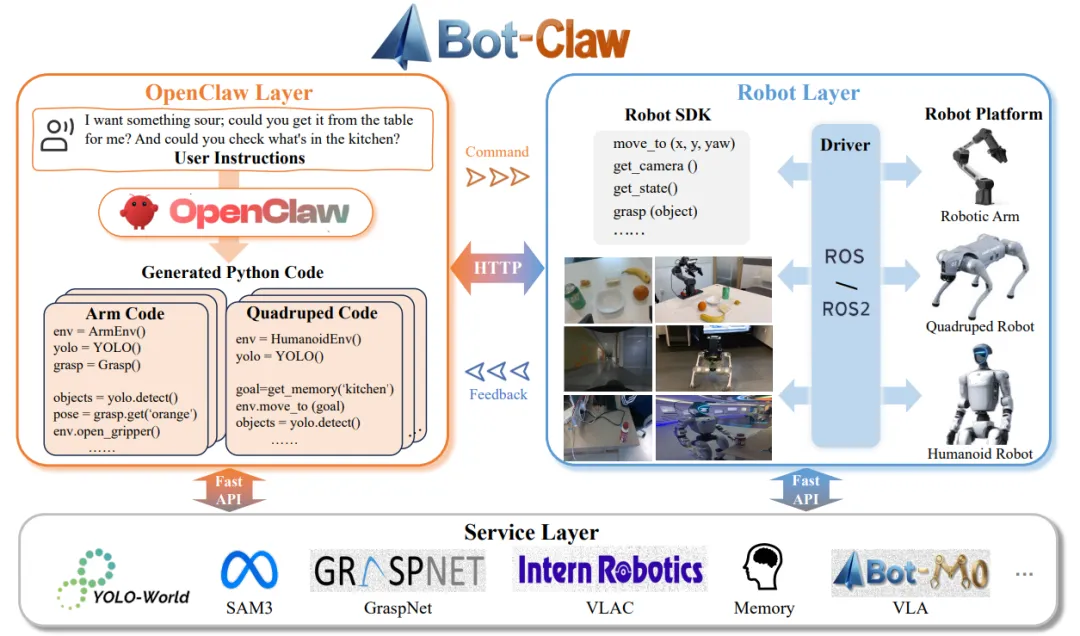
▲ABot-Claw 系统架构:交互、共享服务、具身执行间的分层解耦策略
- OpenClaw 交互调度层:负责自然语言理解、任务分解、能力匹配、代码生成与执行监控。
- 共享服务层:集中部署感知、多模态记忆、评价三大通用服务,供所有机器人调用。
- 机器人具身执行层:通过 ROS 接口统一封装机械臂、人形、四足机器人,负责底层控制与反馈。
核心工作流:指令理解 → 记忆检索 → 能力匹配与调度 → 动作生成执行 → 批评反馈修正/重规划
研究创新点
1. 统一异构机器人协作框架
- 提出one runtime, multiple bodies设计,单个决策引擎协调多形态机器人。
- 设计统一具身接口:把不同机器人原生控制映射为导航、观测、抓取等通用技能。
- 采用能力-位置-负载-优先级四维调度,支持并行执行、任务交接、跨机协作。
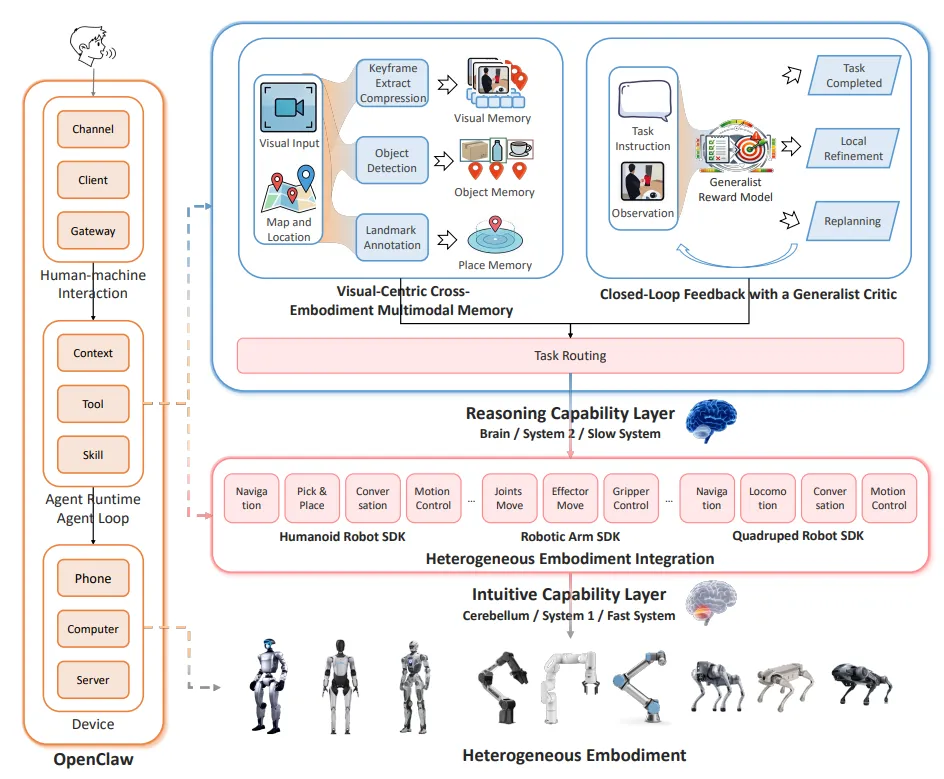
▲ABot-Claw 架构总览:三大核心组件支撑持久、协作、自进化机器人智能体
2. 视觉为中心的跨具身多模态记忆
- 三类记忆:视觉记忆、物体记忆、地点锚点记忆,统一存储、全局共享。
- 检索方式:跨模态语义检索 + 结构化过滤,支持语言/图像查询、空间范围检索。
- 输出统一可导航协议:直接返回全局3D位姿,对接导航与运动规划。
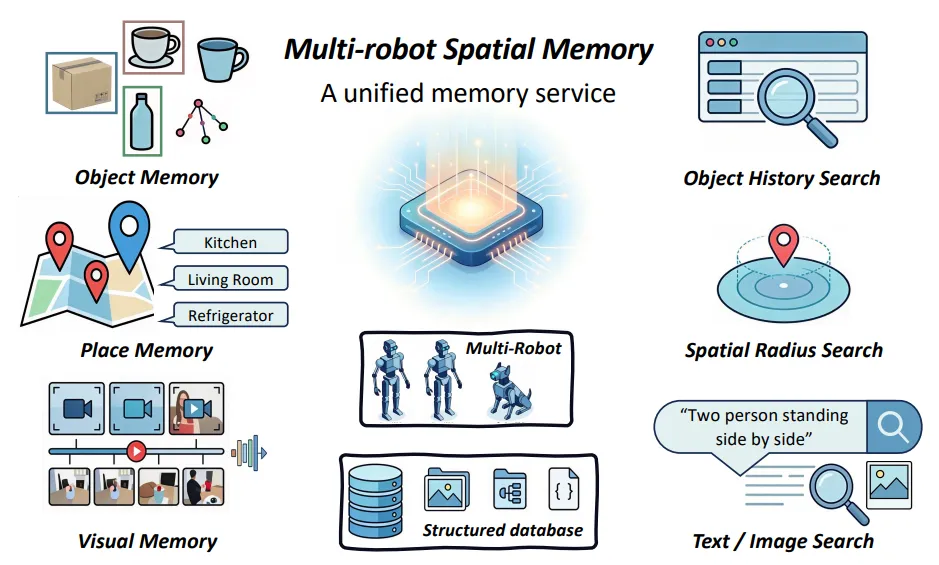
▲视觉为中心的多机器人记忆:统一记忆服务、三类记忆实体与检索方式
3. 批评式闭环反馈与自校正
- 引入通用奖励模型作为 Critic,输入指令+观测,输出任务进度分数。
- 三种决策:完成判定、局部微调、触发重规划,在线处理感知噪声、环境变化、控制漂移。
- 执行轨迹+反馈分数回存记忆,形成执行-评估-决策闭环,支持持续学习。
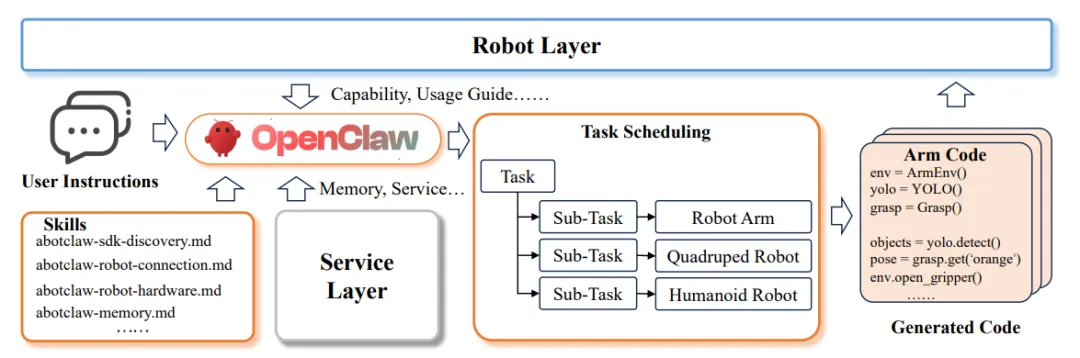
▲OpenClaw 层工作流:指令解析、技能加载、任务分解、代码生成与执行监控
研究局限性
该框架目前存在硬件依赖、记忆效率、反馈鲁棒性、场景覆盖及安全容错等方面的局限,强依赖 ROS 生态且缺乏触觉力觉反馈融合,长期大规模场景下多模态记忆存储开销与检索效率有待优化;
Critic 依赖通用奖励模型导致长尾模糊指令评估稳定性不足,仅在三类机器人上验证、场景覆盖有限,动态环境下极端故障与人机混行的安全容错策略也尚不完善。
完整部署 ABot‑Claw(OpenClaw/Robot/Service)三层架构,让 G1 实现从意图理解到物理执行的闭环能力。
具体实现路径,见文末👉亲手搭建OpenClaw驱动的人形机器人Agent。
03 对话式具身开发工具,降低全流程工程门槛
论文题目:EmbodiedClaw: Conversational Workflow Execution for Embodied AI Development
研究团队:华中科技大学、电子科技大学等
研究方法
研究提出了对话式驱动的具身AI开发新范式,以意图理解、工作流编排、技能执行、资产适配四大模块构建闭环系统;
依托RoboTwin平台,统一仿真环境合成、轨迹生成、模型训练评估三大核心操作,实现从自然语言指令到端到端开发流程的自动转化,支持跨平台、多模型的无缝适配与步骤级验证回退。
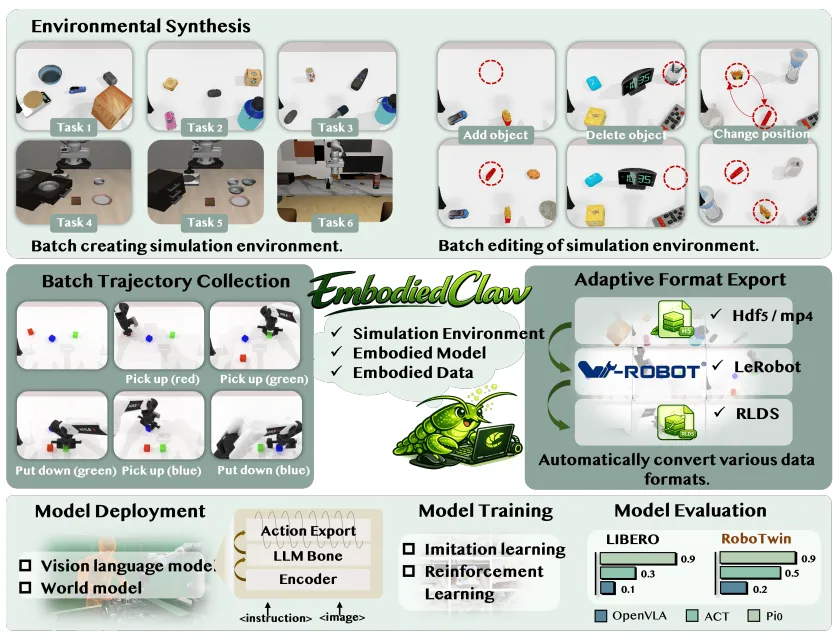
▲EmbodiedClaw 核心能力概览:仿真合成、轨迹生成、模型开发
1. 对话式开发范式革新
- 将具身AI高频工程任务定义为可执行技能,把数天手动工作压缩至数小时,显著降低开发门槛。
- 构建意图-工作流-执行三层解耦架构,自然语言指令自动拆解为标准化技能序列,兼顾灵活性与规范性。
2. 全链路开发统一框架
- 统一仿真环境、轨迹数据、模型三大核心对象,覆盖环境搭建、数据生成、训练评估全流程。
- 设计可复用技能库,支持场景编辑、格式转换、模型部署等模块化组合,适配多样化开发需求。
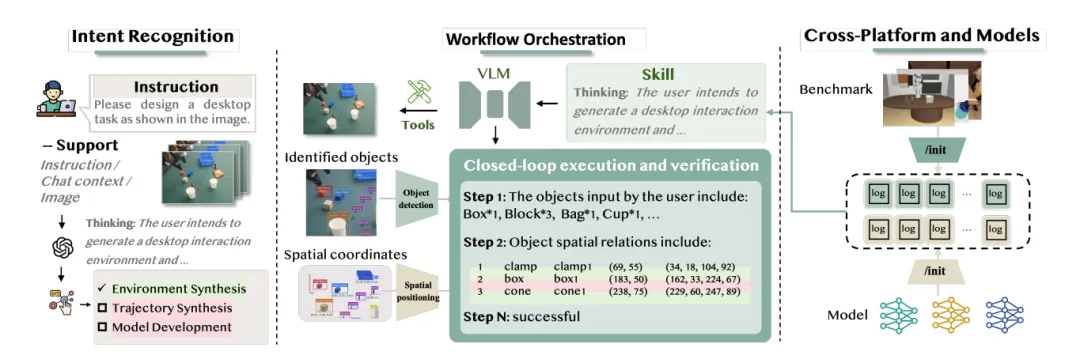
▲EmbodiedClaw 工作流:意图识别、编排、跨平台执行闭环
3. 闭环验证与跨平台适配
- 引入步骤级验证机制,失败自动回退重规划,减少错误累积,提升长流程稳定性。
- 支持第三方资产接入与跨仿真平台迁移,无需重写逻辑,适配RoboTwin、LIBERO等主流基准。
4. 高效且可靠的开发性能
- 开发效率最高提升近一个数量级,仿真数据生成时间从200分钟降至23.4分钟。
- 任务完成率接近人类专家水平,复杂轨迹生成、模型评估任务准确率达90%以上。
研究局限性
框架高度依赖RoboTwin平台生态,跨平台适配能力仍需扩展;
对话意图理解对复杂模糊指令的鲁棒性不足,大规模并行开发场景下调度效率有待优化;
未覆盖物理世界真机部署与真实数据闭环,仿真到现实的迁移能力尚未验证。
04 模型无关ROS 2机器人控制执行层框架
论文题目:ROSClaw: An OpenClaw ROS 2 Framework for Agentic Robot Control and Interaction
研究团队:美国肯特州立大学、OpenDive Technologies等
研究方法
研究构建了基于OpenClaw运行时、适配ROS 2的模型无关执行层,通过能力发现、观测归一化、执行前验证、审计日志四大核心契约,实现任意基础模型与异构机器人的标准化连接。
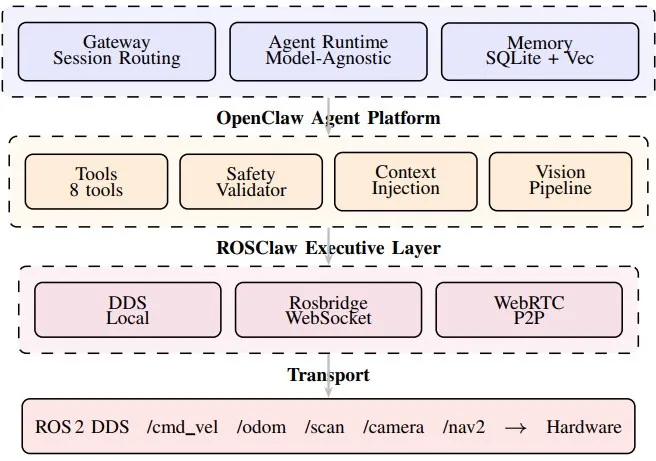
▲ROSClaw框架
1. 模型无关执行层契约标准化
ROSClaw执行层核心契约:能力、观测、验证、日志
- 首次为基础模型机器人定义四大执行层契约,明确能力清单、观测归一化、动作验证、审计日志标准。
- 实现接口不变性:固定机器人/安全约束下,行为差异仅源于模型策略,排除集成干扰。
- 支持可审计决策:拦截/放行动作全量记录,支撑安全溯源与行为分析。
2. ROSClaw分层系统架构:OpenClaw运行时+ROS 2插件层
- 以OpenClaw为核心,开发ROS 2专属插件,封装8类标准工具,适配轮式、四足、人形三类机器人。
- 实现配置级跨模型/跨平台切换,无需修改源码,大幅降低集成成本。
- 兼容DDS、WebSocket、WebRTC三种传输,适配本地/远程部署场景。
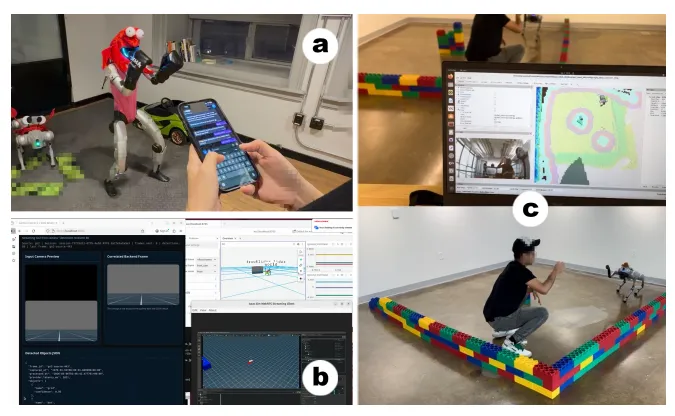
▲ROSClaw 部署场景与系统工具概览
3. 跨模型行为量化与安全分析:四类模型在结构化/开放任务中的行为差异
- 在统一安全约束下,不同模型策略导致4.8倍越界行为差异,前沿模型间仍有3.4倍差距。
- 设计开放/安全任务集,揭示模型在指令解读、风险偏好上的显著分化。
- 建立跨框架对比协议,与ROSA基准对照,验证执行层设计对任务完成率、安全性的关键影响。
4. 可控可复现实验平台:跨形态机器人与多模型对比实验环境
- 支持TurtleBot3、Unitree Go2、G1三类机器人,覆盖主流形态。
- 提供标准化评估套件,包含结构化、开放、安全三类任务,可复现模型行为对比实验。
- 开源协议脚本,为具身AI研究提供统一测量基准。
研究局限性
框架依赖ROS 2生态,跨平台适配需额外开发;安全校验仅覆盖速度等基础约束,复杂场景防护不足。
模型差异分析集中在指令层面,深层策略影响未充分探究;仅在有限机器人与模型上验证,大规模部署稳定性待测试。
05 长期记忆增强 VLA,提升开放世界长时任务能力
论文题目:ChemBot: Long-Term Memory for VLA-based Agents in Open-World Task Execution
研究团队:南京大学、LimX Dynamics
研究方法
研究构建了“规划层智能体+执行层VLA”分层闭环框架,设计双层级记忆机制,结合多智能体协作完成任务分解,通过进度感知VLA模型生成连续动作并实时监控执行状态。
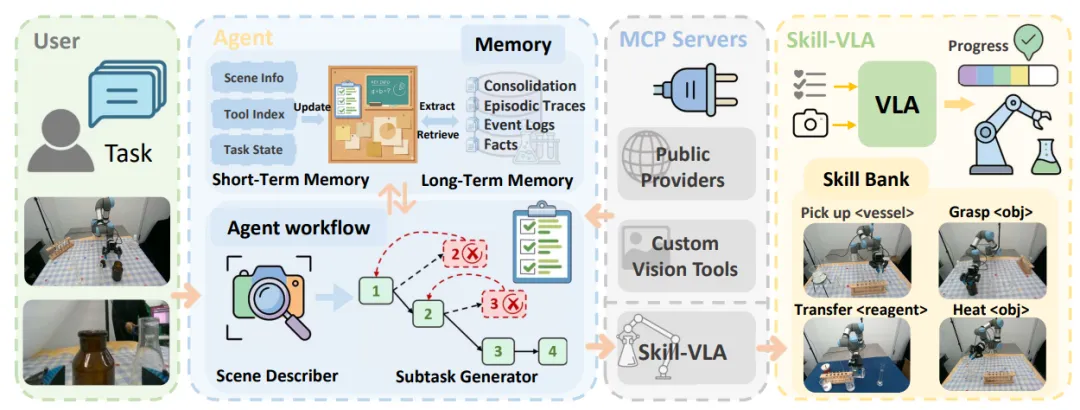
▲ChemBot 系统架构
1. 分层闭环智能体架构
- 提出“Agent-as-Planner、VLA-as-Skill”范式,高层智能体负责全局规划、低层VLA执行精细操作,实现推理与执行解耦。
- 融合多智能体协同任务分解、双层级记忆与进度感知VLA,构建长时序化学实验自主执行闭环。
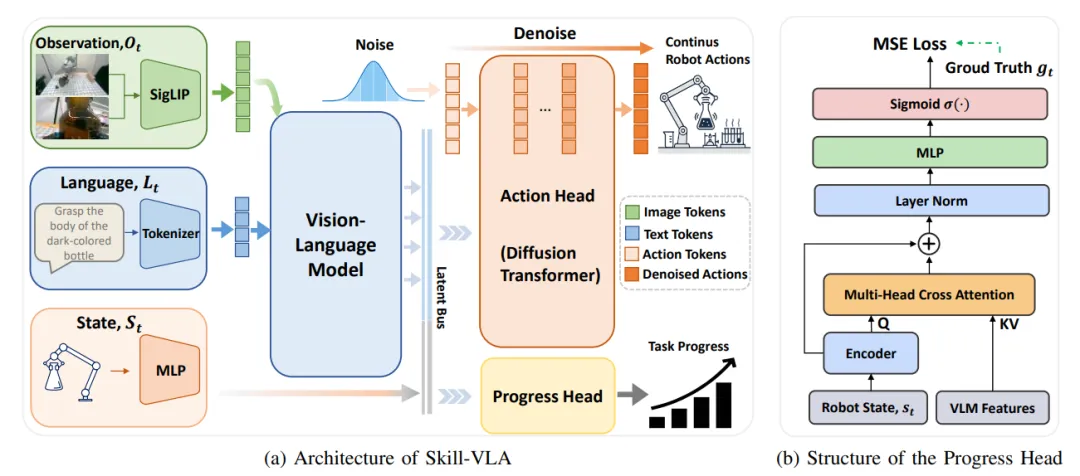
▲Skill-VLA 网络结构
2. 双层级记忆机制
- 短期记忆(Dashboard):结构化存储场景信息、工具索引与任务状态,压缩上下文、动态跟踪实验进度。
- 长期记忆:持久保存历史对话与实验轨迹,支持语义检索、经验复用与个性化适配。
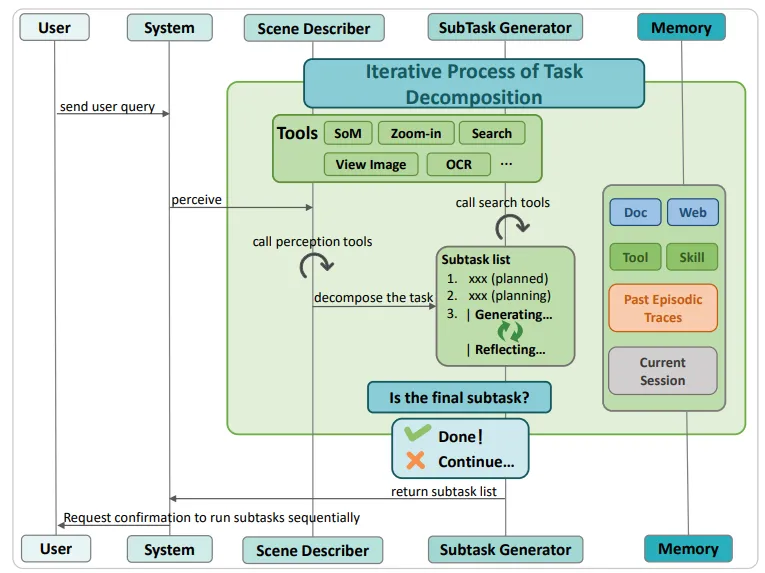
▲多智能体任务分解时序图
3. 进度感知VLA模型
- 在GR00T基础上添加进度预测头,实时输出0-1连续进度值,实现无固定步长的动态任务切换。
- 采用异步推理机制,解耦模型推理与控制循环,生成平滑连续动作,避免控制延迟导致的危险中断。
研究局限性
依赖LLM规划可靠性,透明实验器皿视觉感知难度大;仅在有限化学场景验证,跨新场景泛化能力不足;
未实现跨设备协作,触觉反馈缺失,极端危险实验的安全容错策略有待完善。
06 核心共性与差异化对比
以上五篇基于OpenClaw底座的具身智能研究成果,均瞄准大模型驱动机器人产业落地核心诉求,形成高度一致的技术发展共识:
- 技术架构均依托OpenClaw轻量化智能体底座搭建体系,遵循自然语言意图驱动逻辑,打通感知、规划、决策、执行全链路,完成机器人开发范式重构;
- 攻坚方向统一瞄准传统机器人代码控制弊端,集中解决数据采集成本高、长时序任务执行力弱、异构设备难以协同、仿真真机割裂、缺乏自主迭代能力五大行业痛点;
- 研发逻辑均摒弃纯模型优化思路,坚持框架解耦、模块化技能封装、闭环反馈迭代三大设计原则,兼顾技术通用性与场景实用性;
- 落地目标高度统一,均致力于推动机器人开发从人工编码操控转向智能体自主运行,降低具身智能研发门槛,搭建可复用、可迁移、可进化的通用机器人技术路径。
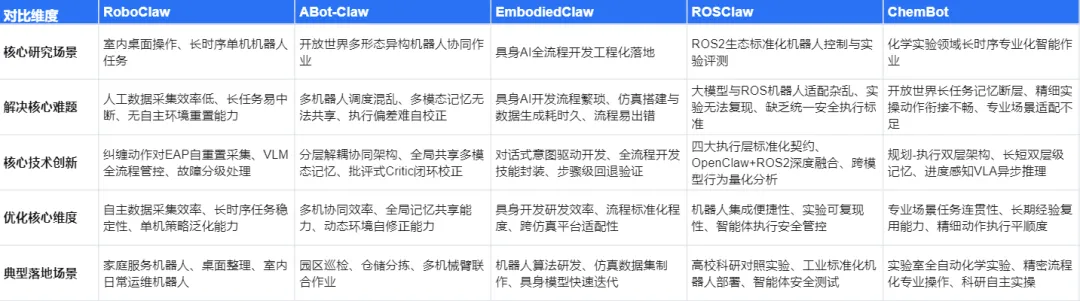
▲核心差异化
掌握:亲手搭建OpenClaw驱动的人形机器人Agent
让宇树G1具备从意图理解到物理执行的完整能力,在真实场景中完成长时程复杂任务。
我们集成了OpenClaw Agent框架 + 宇树G1人形机器人,构建一套完整的具身智能系统:
接收任务→前往电梯口接学员→到达电梯口→接到学员→引导至指定会议室→完成任务→自查并返回任务执行报告。

▲深蓝学院实拍 | 小龙虾课程的demo
现在我们将这套完整系统首次正式开放,开设新一期《人形机器人项目实战》——OpenClaw驱动的人形机器人Agent
2天高强度真机实训,你将亲手完成:
1️⃣ 从零搭建Agent技能库:导航、人脸识别、语音交互、物体识别;
2️⃣ 为G1适配灵心巧手06灵巧手,完成机械臂逆解与AnyGrasp抓取位姿估计并封装自主抓取Skil;
3️⃣ 部署ABot-Claw三层架构(OpenClaw/Robot/Service)。
仅剩最后4个实战名额

07 总结
整体来看,OpenClaw 系列五项研究成果,从上层智能体架构、协作运行机制,到开发交互模式、底层硬件控制以及记忆能力优化,完成了多维度的技术布局,构建起层次清晰的机器人智能体技术体系。
该系列研究针对行业现存问题给出了对应的技术实现路径,也为意图驱动的机器人研发模式提供了可行参考。
当然目前相关框架仍处于理论研究与技术探索阶段,在实际场景适配、大规模量产落地、复杂真实环境稳定性等方面,依旧存在诸多待验证与优化的空间。
此外,这些框架之间的互操作性、与现有机器人中间件的生态兼容性,也将影响其在实际部署中的适用性。
Ref
1. RoboClaw: An Agentic Framework for Scalable Long-Horizon Robotic Tasks(https://arxiv.org/pdf/2603.11558)
2. ABot-Claw: A Foundation for Persistent, Cooperative, and Self-Evolving Robotic Agents(https://arxiv.org/pdf/2604.10096)
3. EmbodiedClaw: Conversational Workflow Execution for Embodied AI Development(https://arxiv.org/pdf/2604.13800)
4. ROSClaw: An OpenClaw ROS 2 Framework for Agentic Robot Control and Interaction(https://arxiv.org/pdf/2603.26997)
5. Long-Term Memory for VLA-based Agents in Open-World Task Execution(https://arxiv.org/pdf/2604.15671)

Agent 垂直技术社区,欢迎活跃、内容共建。
更多推荐


 4
4 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)