【单片机毕业设计】【mcuclub-dz-194】基于单片机的语音识别智能垃圾桶设计
近年来,随着社会经济的不断发展、城市规模的不断扩大以及人们消费水平的不断提高,城市生活产生的垃圾总量也在不断增加,由此导致的环境污染问题日益严峻,虽待解决。垃圾桶作为收纳废弃物的一种工具,正在城市生活垃圾管理系统中被应用,不仅分类垃圾桶得到大面积普及,而且智能垃圾桶也得到飞速发展,它们的出现极大地方便了环卫工人的清洁以及有效降低了废弃物对环境的影响。智能垃圾桶地应势而生,也蕴含着高新技术的突破和发
最近设计了一个项目基于单片机的语音识别智能垃圾桶设计,与大家分享一下:
一、基本介绍
项目编号:mcuclub-dz-194
功能介绍:
单片机类型:STM32F103C8T6
具体功能:
1、通过舵机控制垃圾桶的打开和关闭1
2、通过红外避障管检测垃圾桶前是否有人,如果有人,自动打开,直到人离开,3s后自动关闭垃圾桶
3、通过分离式红外对射管检测垃圾桶是否装满,如果未装满亮绿灯,装满亮红灯,并不能打开垃圾桶盖,同时启动打包装置(继电器模拟)
4、通过按键可设置垃圾桶间隔多长时间进行消毒,消毒期间不能打开垃圾桶盖
5、通过MQ-2检测烟雾值,通过DS18B20检测温度值,当烟雾值或温度值大于设置最大值,进行蜂鸣器报警,通过按键可设置烟雾最大值、温度最大值
6、通过OLED显示测量数据
7、通过语音识别模块可语音打开垃圾桶
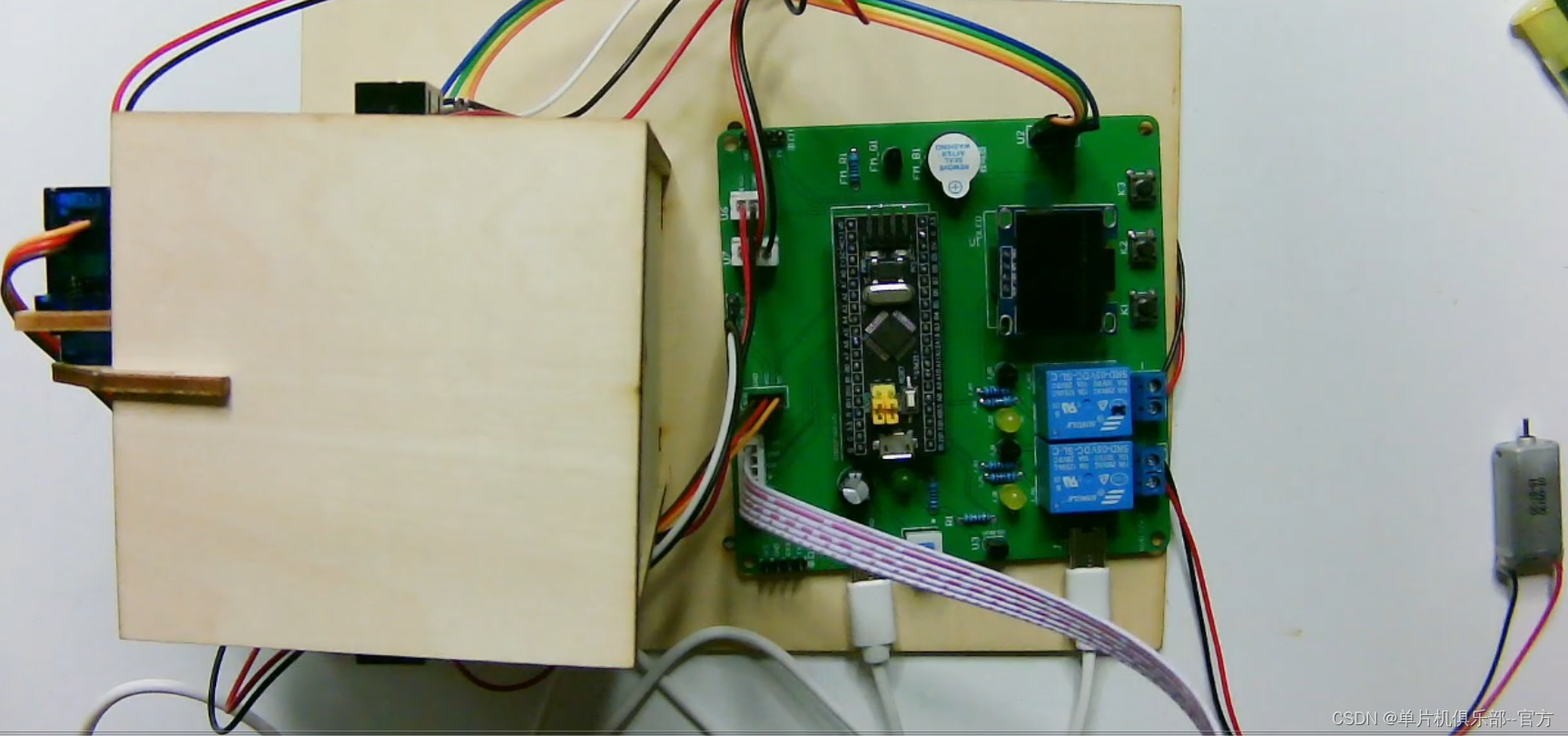
二、32实物图
单片机型号:STC89C32
板子为绿色PCB板,两层板,厚度1.2,上下覆铜接地。元器件基本上为插针式,个别降压芯片会使用贴片式。
供电接口:TYPE-C
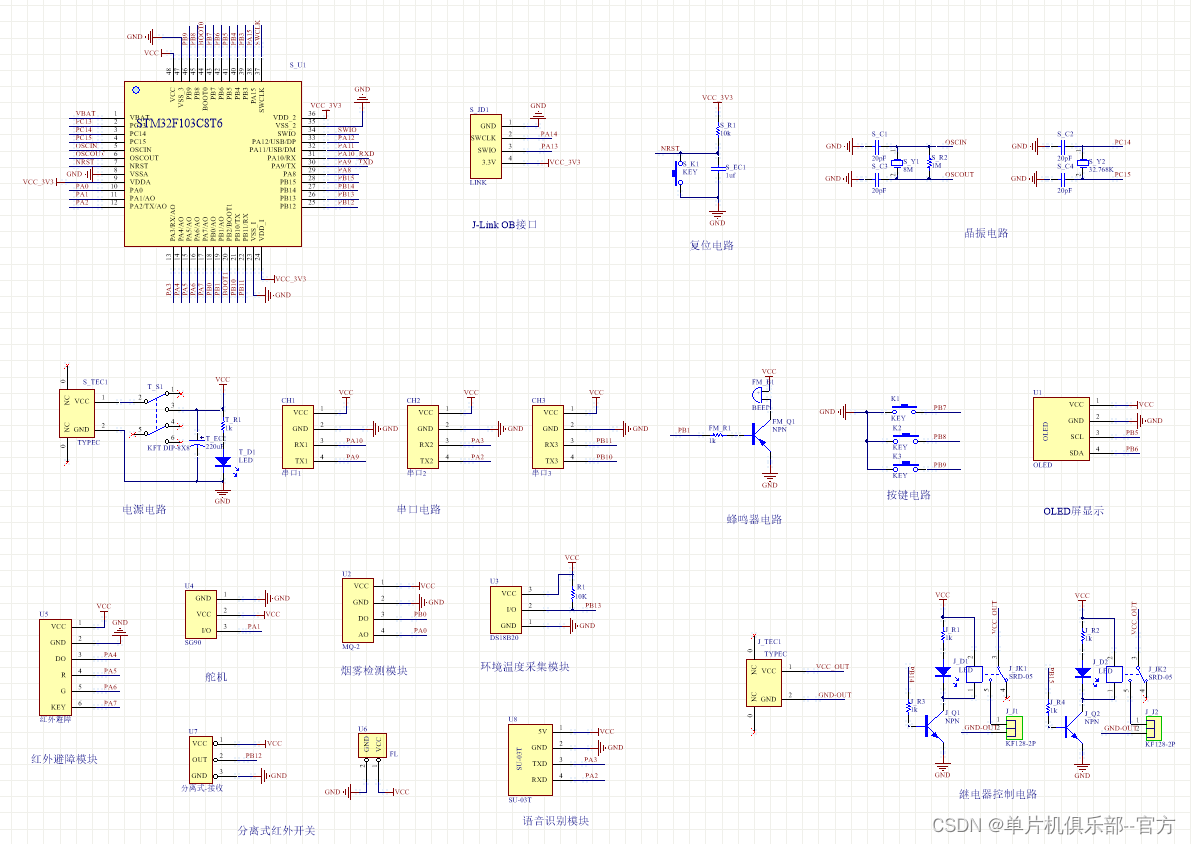
三、原理图
软件版本:AD2013
电路连线方式:网络标号连线方式
注意:原理图只是画出了模块的引脚图,而并不是模块的内部结构原理图
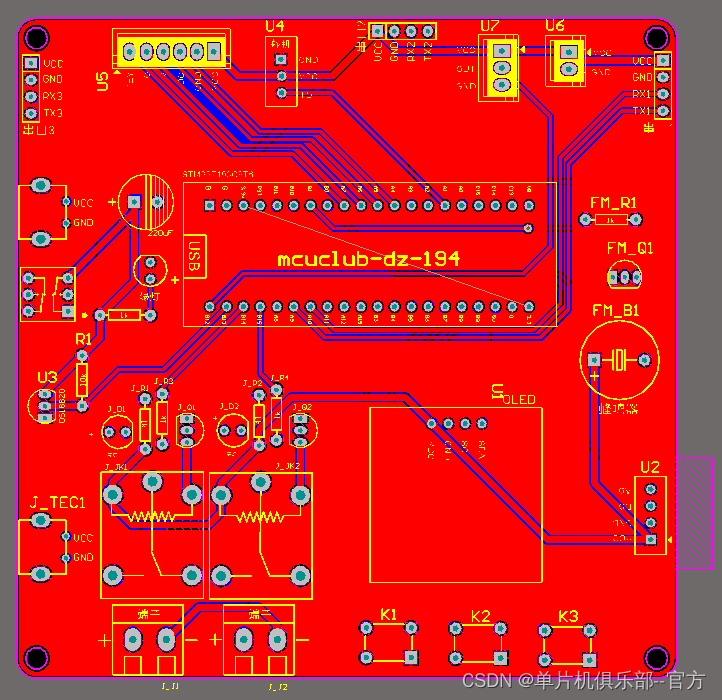
四、PCB图
由原理图导出,封装很大一部分都是作者自己绘制,不提供封装库,只提供连接好的源文件。中间有一个项目编号,隐藏在单片机底座下,插入单片机后不会看到。
两层板,上下覆铜接地。
五、系统框图
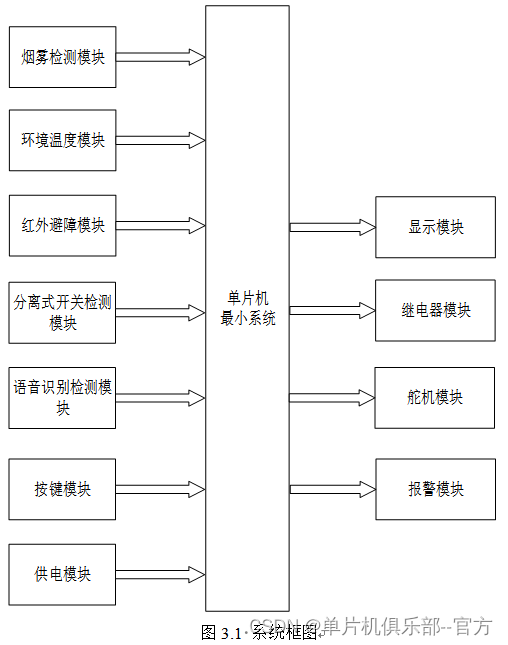
本设计以单片机为核心控制器,加上其他模块一起组成此次设计的整个系统,其中包括中控部分、输入部分和输出部分。中控部分采用了单片机控制器,其主要作用是获取输入部分的数据,经过内部处理,逻辑判断,最终控制输出部分。输入由七部分组成,第一部分是烟雾检测模块,通过该模块检测垃圾桶的烟雾浓度;第二部分是环境温度检测模块,通过该模块检测垃圾桶内的温度;第三部分是红外避障检测模块,通过该模块检测当前垃圾桶前是否有人;第四部分是分离式红外开关检测模块,通过该模块检测垃圾通是否装满;第五部分是语音识别检测模块,通过该模块语音识别打开垃圾桶;第六部分是按键模块,通过该模块可以设置垃圾桶消毒时间、烟雾浓度、温度等最大值;第七部分是供电模块,通过该模块可给整个系统进行供电。输出由四部分组成,第一部分是显示模块,通过该模块可以显示监测的数据;第二部分是继电器模块,通过两个继电器分别控制打包装置和消毒继电器;第三部分是舵机模块,通过该模块模拟垃圾桶的打开和关闭。第四部分是蜂鸣器报警模块,当监测到垃圾桶内的温湿度、烟雾浓度值大于设置的最大值时,通过该模块进行蜂鸣器报警。具体系统框图如图3.1所示。
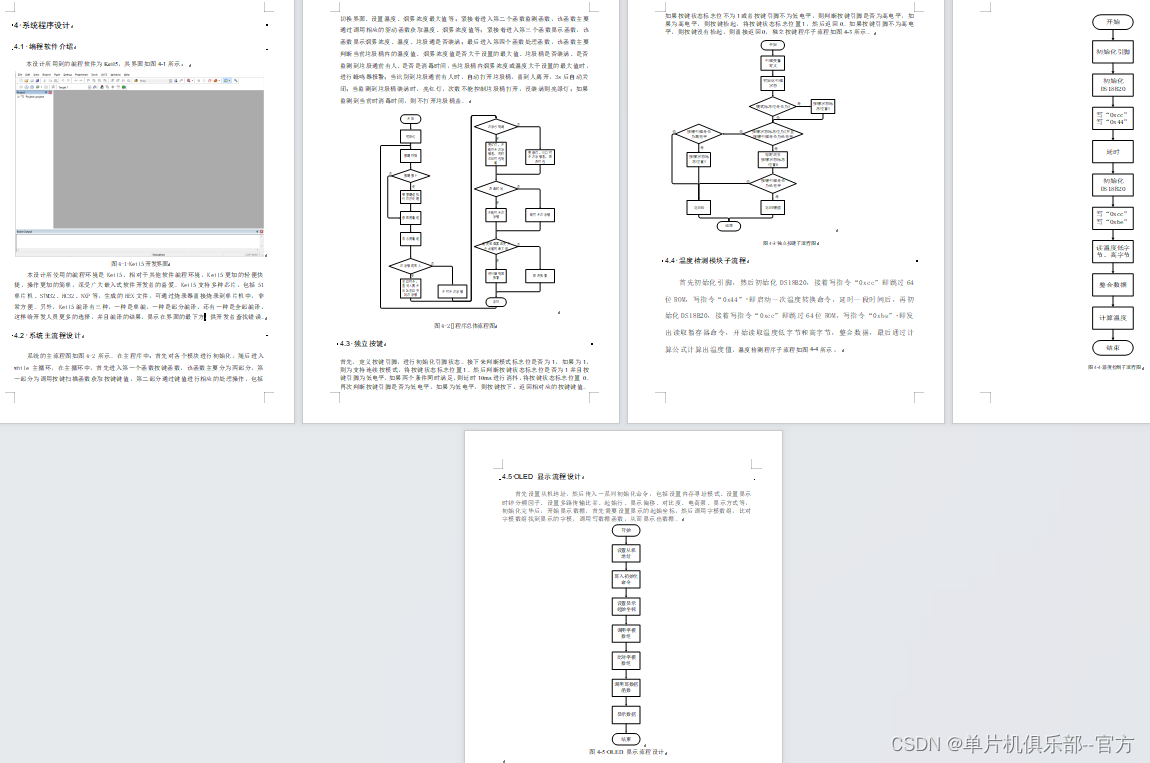
六、软件设计流程
七、部分程序展示
软件版本:keil5
逻辑程序和驱动程序分开,分布于main.c和其他.c文件
*******处理函数
*****/
void Manage_function(void)
{
if(flag_display == 0) //测量界面
{
if(IR_1 == 1) //红外对管监测满
{
if(flag_IR_1 == 0)
{
Delay_ms(1000);
flag_IR_1 = 1;
}
RELAY_DB = 1;
flag_timer_begin_2s = 1;
LED_G = 0;
LED_R = 1;
}
else
{
LED_R = 0;
LED_G = 0;
flag_IR_1 =0;
}
if(flag_2s == 1)
{
flag_2s = 0;
RELAY_DB = 0;
flag_timer_begin_2s = 0;
}
if(RELAY_XD == 0) //没有消毒的时候 有人打开垃圾桶 直到人离开,3s后自动关闭垃圾桶
{
if(IRED == 0 && pwm_duoji_1 == 5)
{
pwm_duoji_1 = 15;
flag_door_mode = 1;
}
else if(IRED == 1 && pwm_duoji_1 == 15)
{
flag_timer_begin_1s = 1;
}
}
if(flag_1s == 1)
{
flag_1s = 0;
flag_timer_begin_1s = 0;
pwm_duoji_1 = 5;
}
if(smog_value > smog_max || temp_value > temp_max *10)
{
if(time_num % 5 == 0)
{
BEEP = ~BEEP;
}
}
else
{
BEEP = 0;
}
/*消毒时长*/
if((time_tw_s1+time_tw_m1*60+time_tw_h1*3600) > 0)
{
flag_tw = 1;
}
else
{
flag_timer_begin_tw = 0;
flag_1s_tw = 0;
flag_tw = 0;
}
if(flag_timer_begin_tw == 0) //重新装载时间
{
time_tw = time_tw_s1+time_tw_m1*60+time_tw_h1*3600;
}
if(flag_tw == 1) //开始消毒,计时开始
{
flag_timer_begin_tw = 1;
}if(flag_1s_tw == 1) //1s到达,时长-1s
{
flag_1s_tw = 0;
if(time_tw > 0) //时长>0
time_tw--; //时长-1
else //时长=0
{
flag_tw_end = 1;
}
}
if(flag_tw_end == 1) //定时时间到达开始消毒
{
RELAY_XD = 1;
}
else //5s后结束消毒
{
RELAY_XD = 0;
}
}
else //设置界面
{
BEEP = 0;
}
}

Agent 垂直技术社区,欢迎活跃、内容共建。
更多推荐


 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)