open claw esp32部署 —— mimi claw (国内无代理版本)保姆级教程
本文介绍了在ESP32上部署MimiClaw机器人的完整流程。首先需在飞书开放平台创建企业应用并获取AppID/Secret,然后注册MoonshotAI平台获取Kimi大模型API Key。部署过程包括:1)通过USB连接设备;2)使用命令行配置WiFi、飞书凭证和Kimi API;3)在飞书平台配置回调事件。文中提供了CSDN博客教程和Git仓库地址,帮助用户快速完成本地化部署,实现与飞书机器
概述
我这 open claw esp32部署 —— mimi claw-CSDN博客 介绍了mimi claw的简易部署方案。本文将重点介绍如何利用国内资源直接配置,无需代理即可完成。
飞书api-key获取:
开发者后台 - 飞书开放平台访问开发者平台,选择"企业自建应用"并创建新应用。
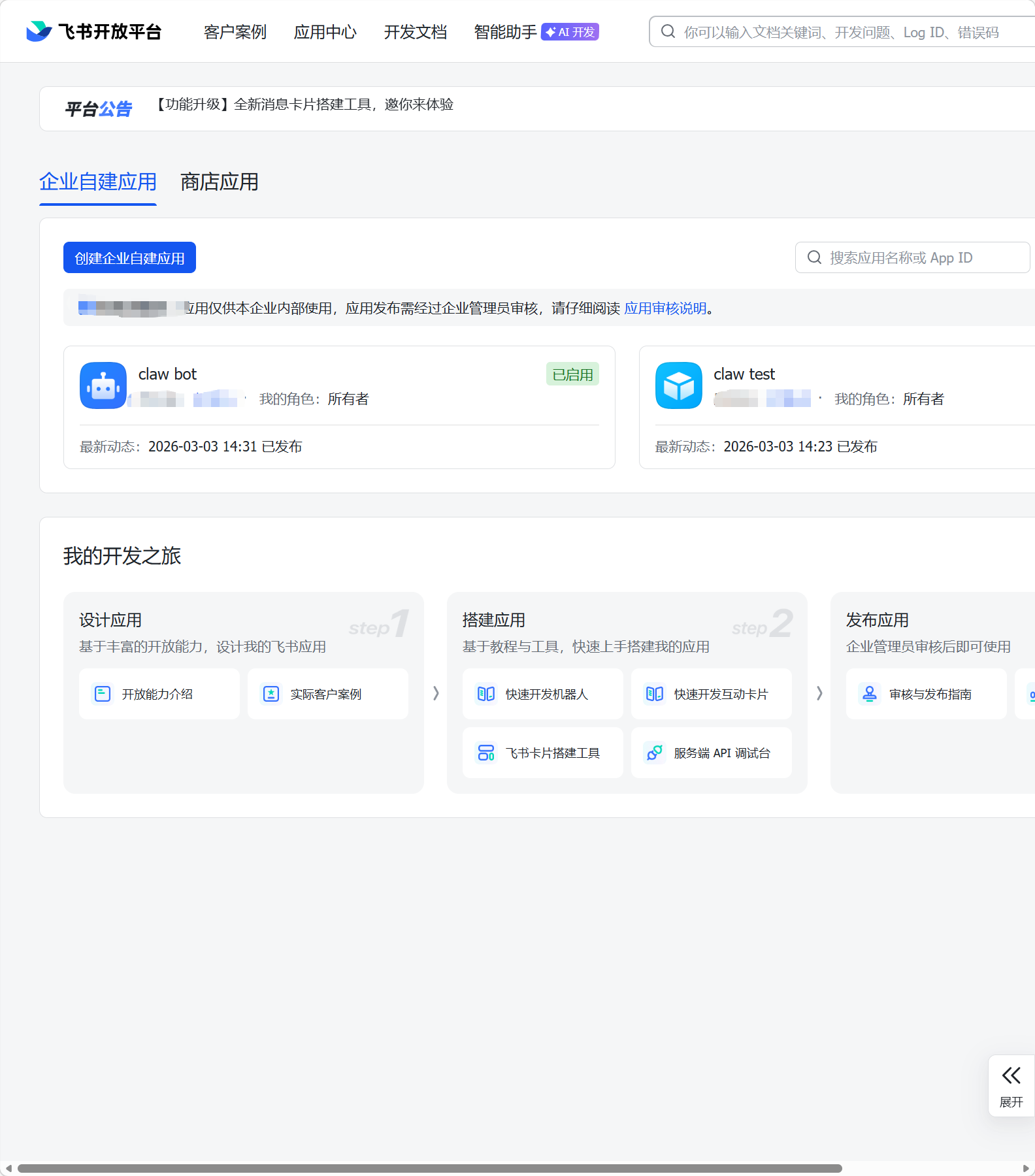
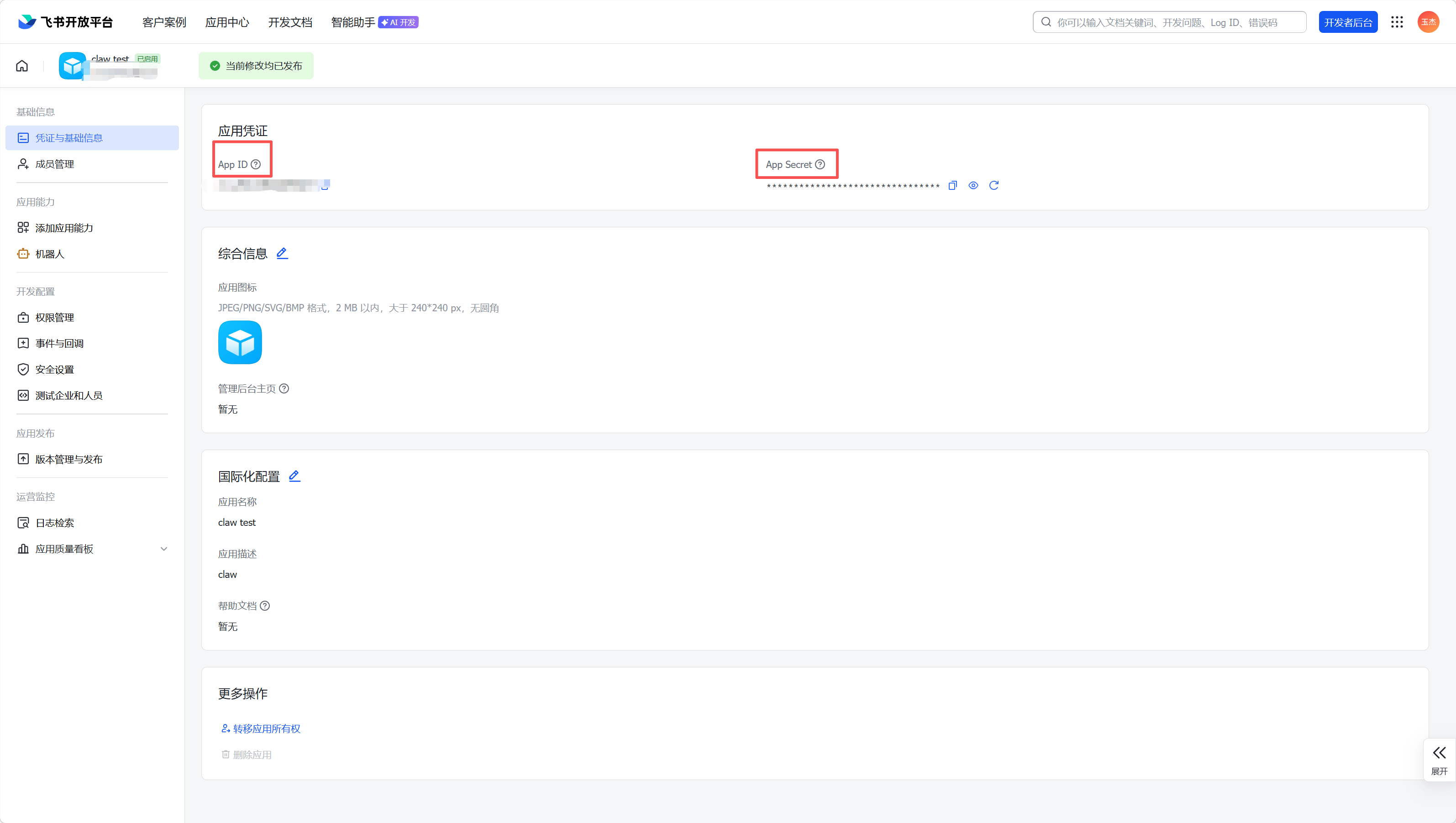
记录你的App ID和App Secret,后续要用到
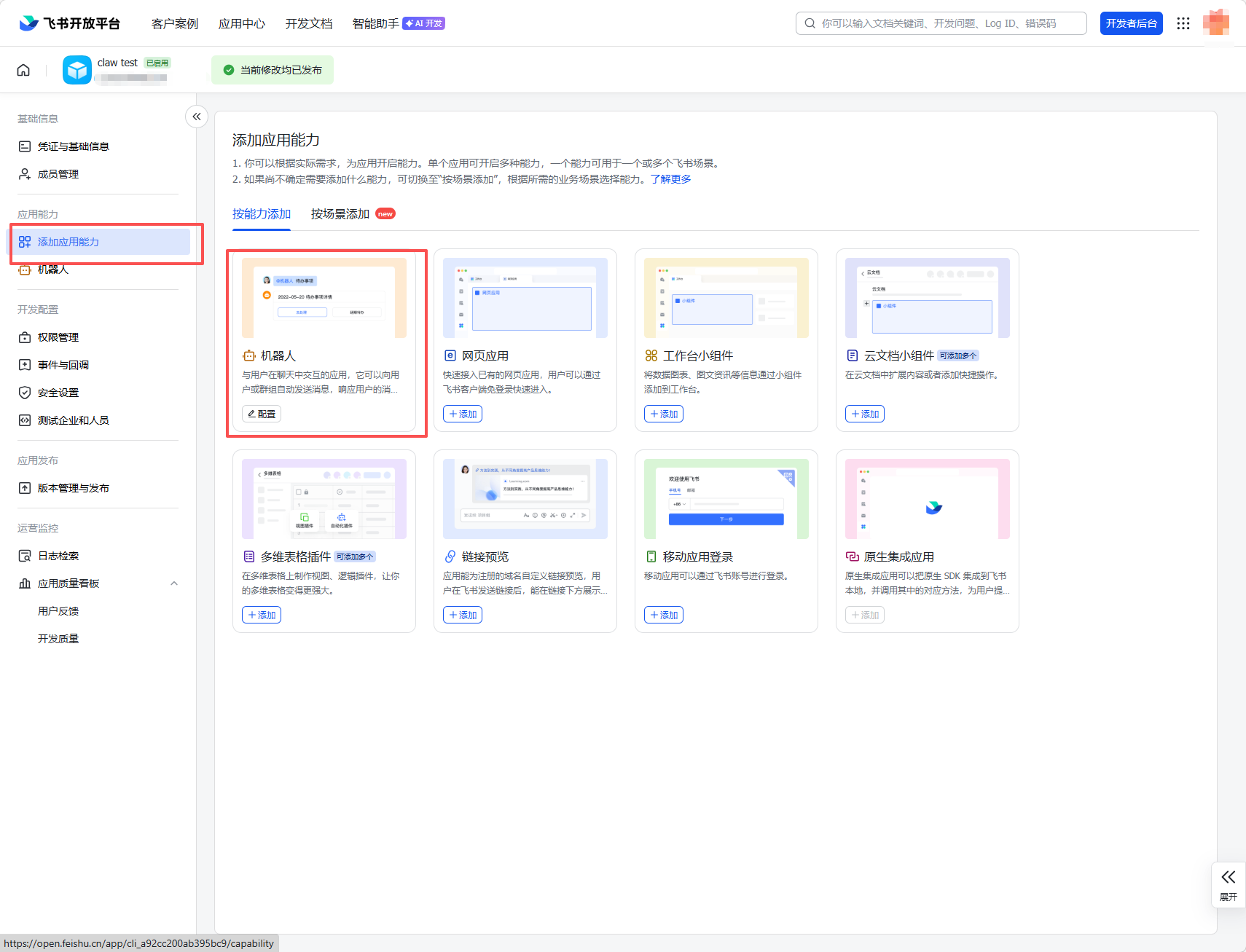
应用创建完成之后添加机器人
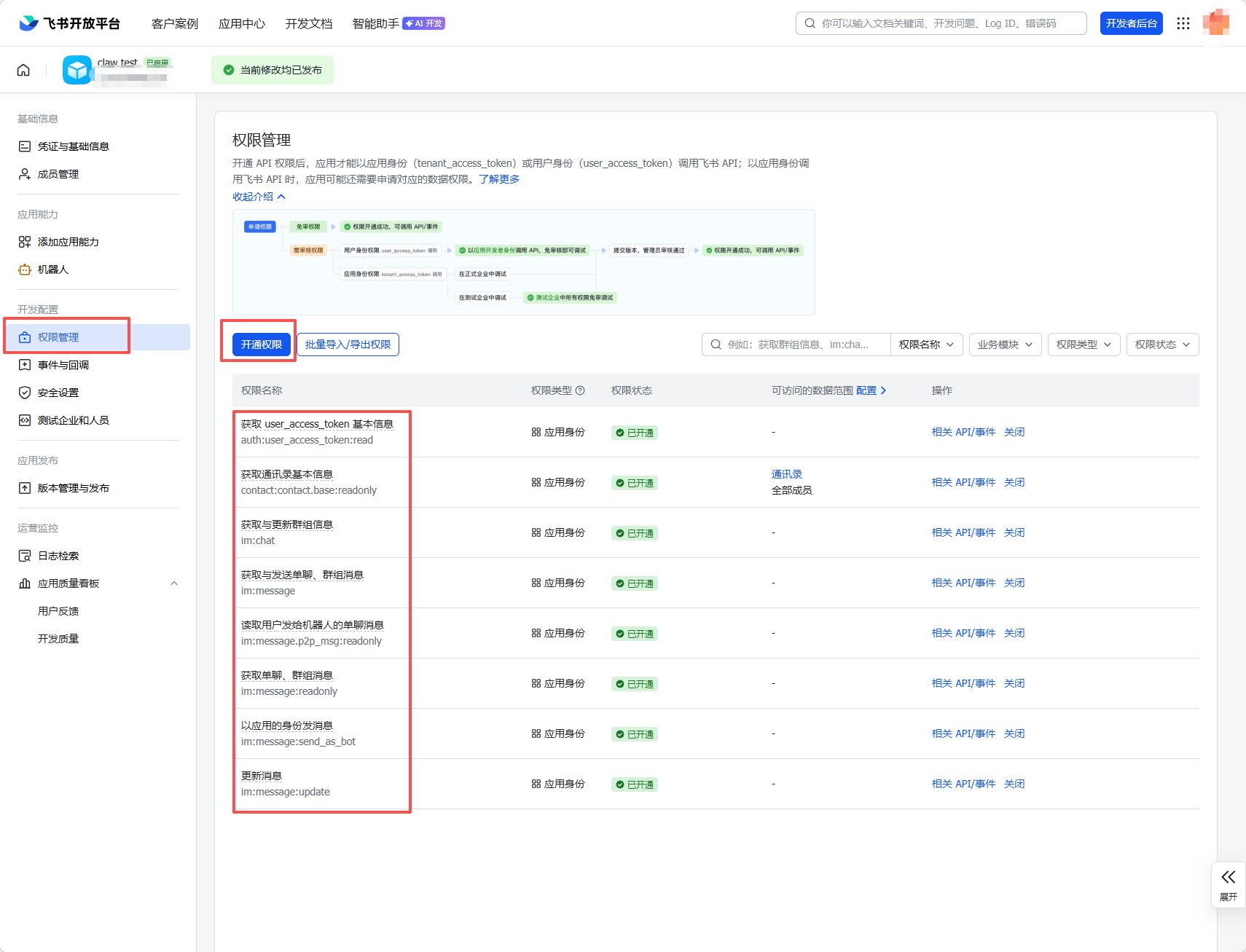
 开通权限,按照图片上开通相应的权限
开通权限,按照图片上开通相应的权限
先创建版本并发布
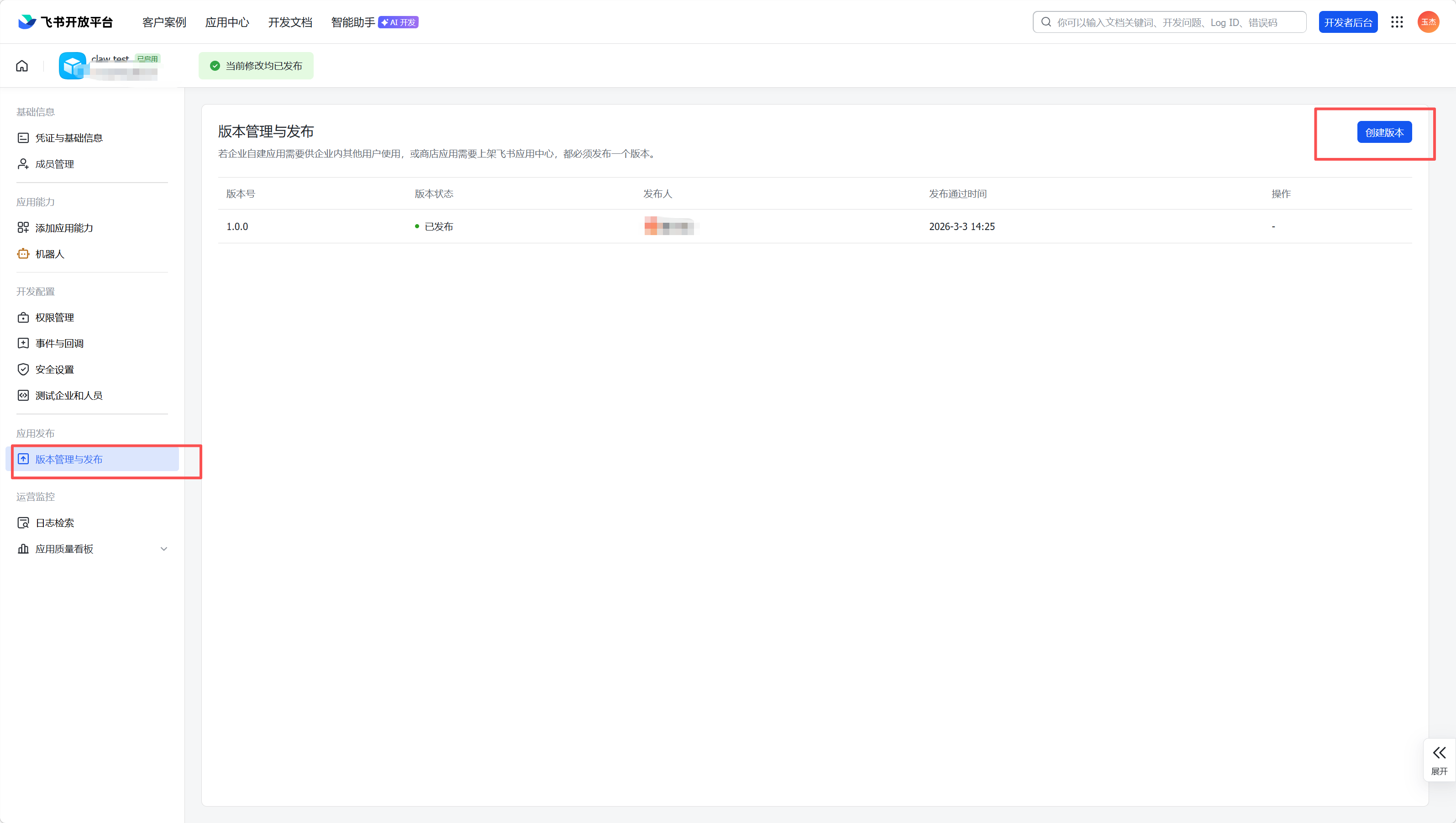
现在您可以在飞书找到新发布的机器人了。目前还无法与其对话,接下来我们需要先配置 Mimi Claw,完成后再回到飞书平台开启回调事件即可。
Kimi 本地化部署
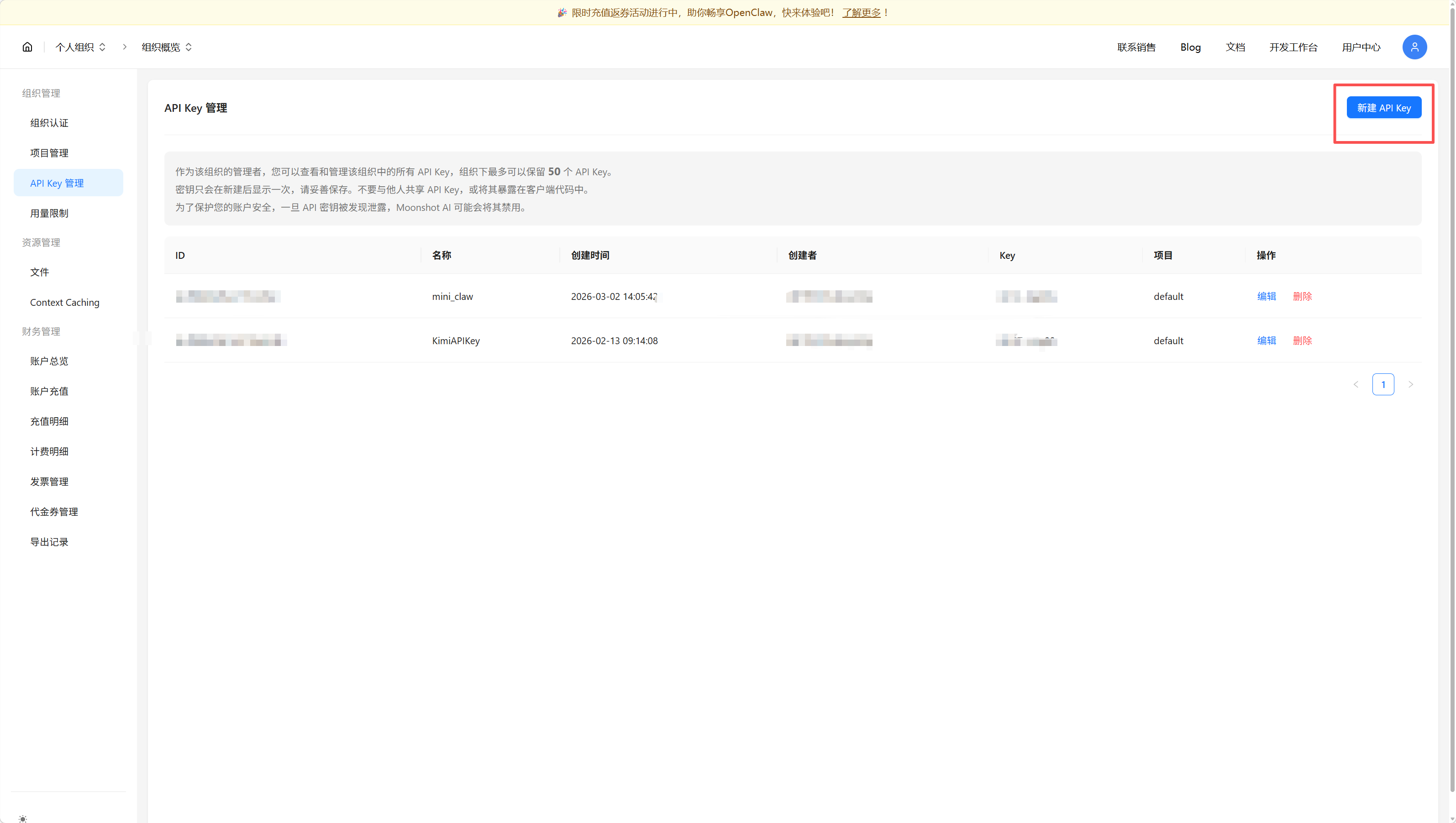
注册并登录kimi的控制台Moonshot AI 开放平台 - Kimi K2.5 大模型 API 服务,新注册用户可以领到15元的免费额度。新建key并记录。
mimiclaw 配置
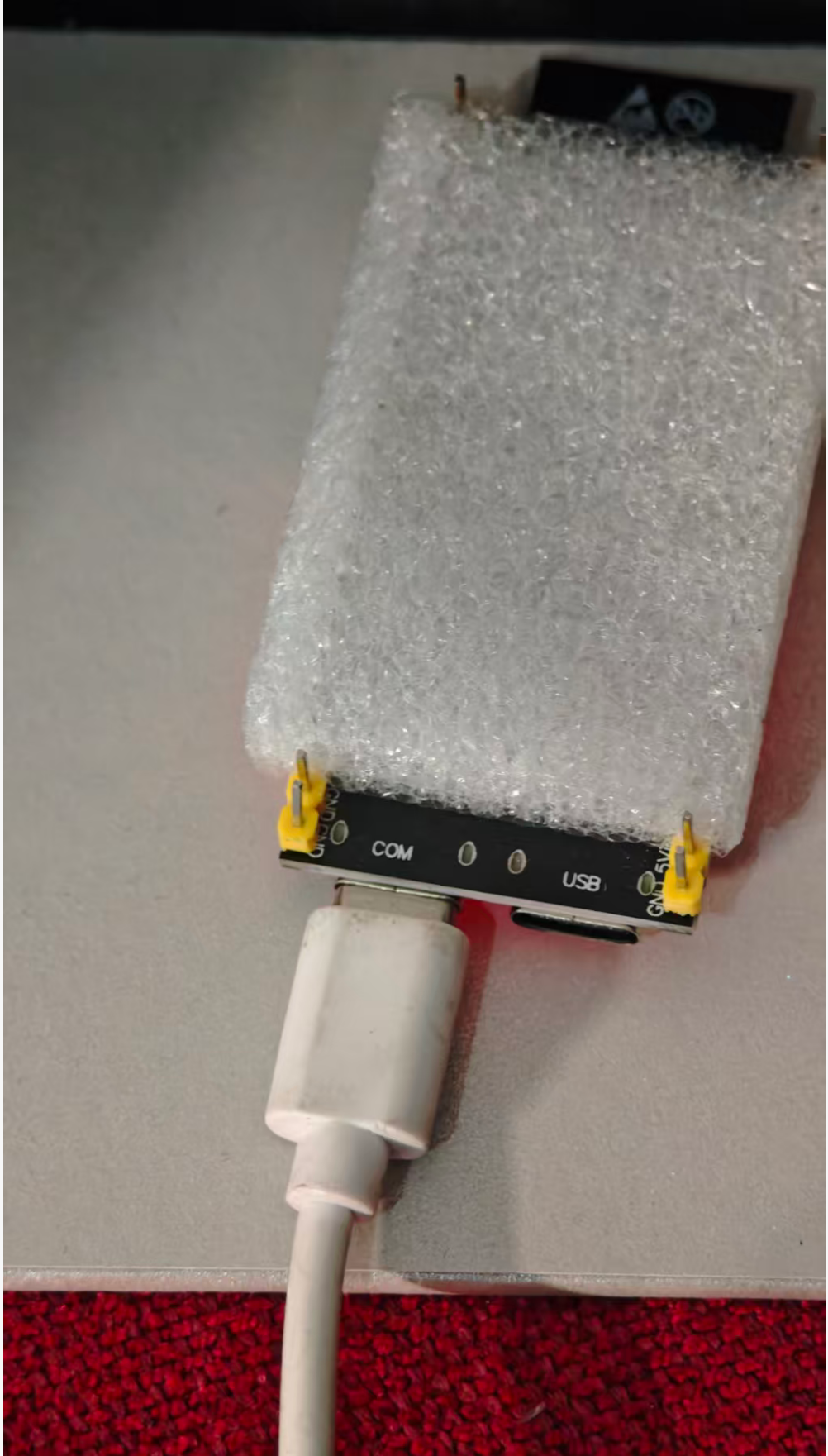
使用USB连接COM口。
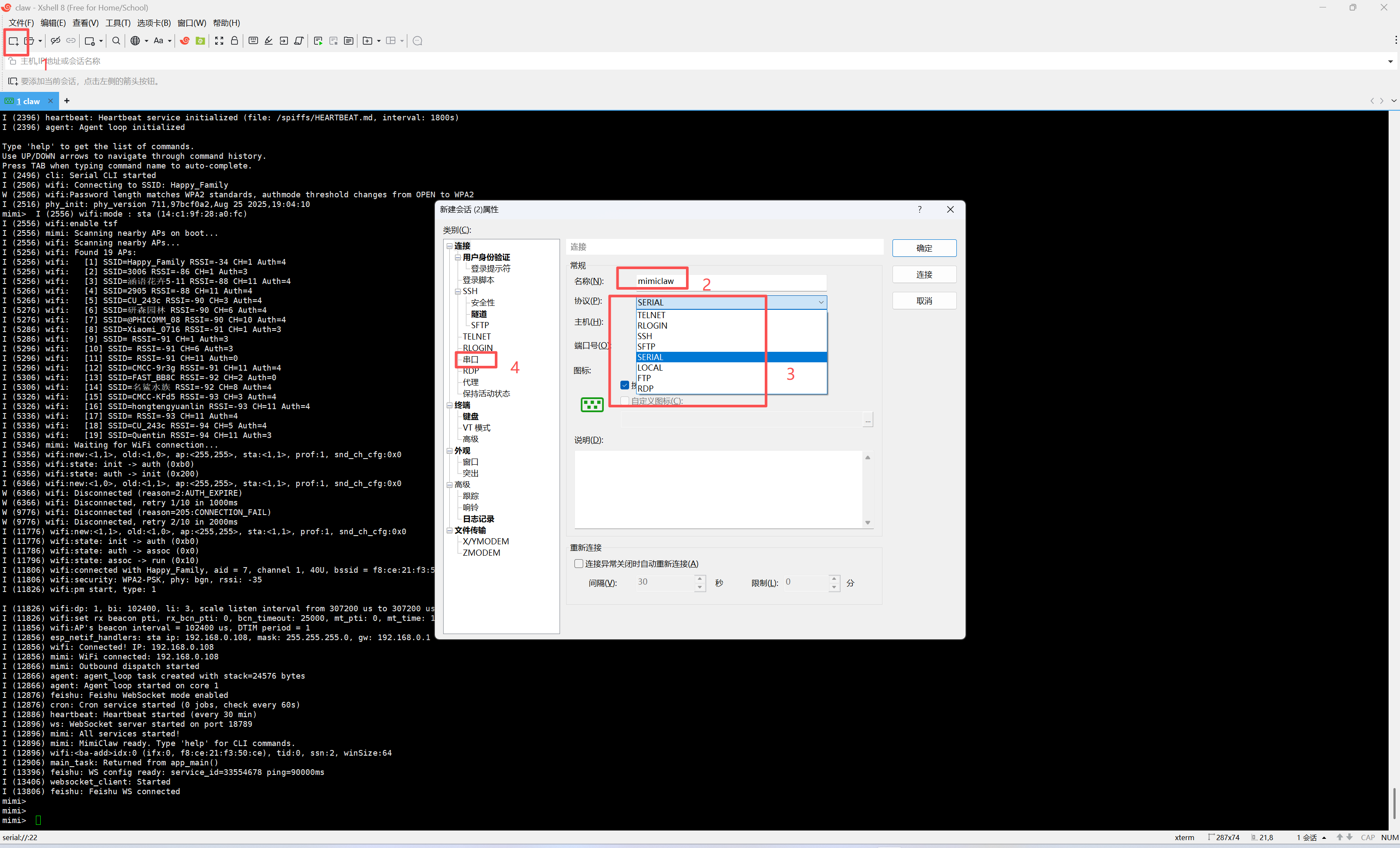
打开命令行工具,我这里用的XShell,建立连接过程以及连接之后的界面如下图。
若您已在mimi_secrets.h文件中完成配置(文件路径:mimiclaw/main/mimi_secrets.h,配置方法可参考open claw esp32部署 —— mimi claw-CSDN博客),则无需执行后续命令行操作。否则,请按照以下步骤通过命令行完成配置。
命令行配置
// 设置wifi,例如:set_wifi xxx 12345678
set_wifi MySSID MyPassword
//设置飞书,例如:set_feishu_creds cli_xxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
set_feishu_creds <app_id> <app_secret>
//设置供应商
set_model_provider kimi
//设置模型,这里也可以选择其他的模型
set_model moonshot-v1-8k
//设置kimi的api-key
set_api_key sk-xxxxx
//最后重启
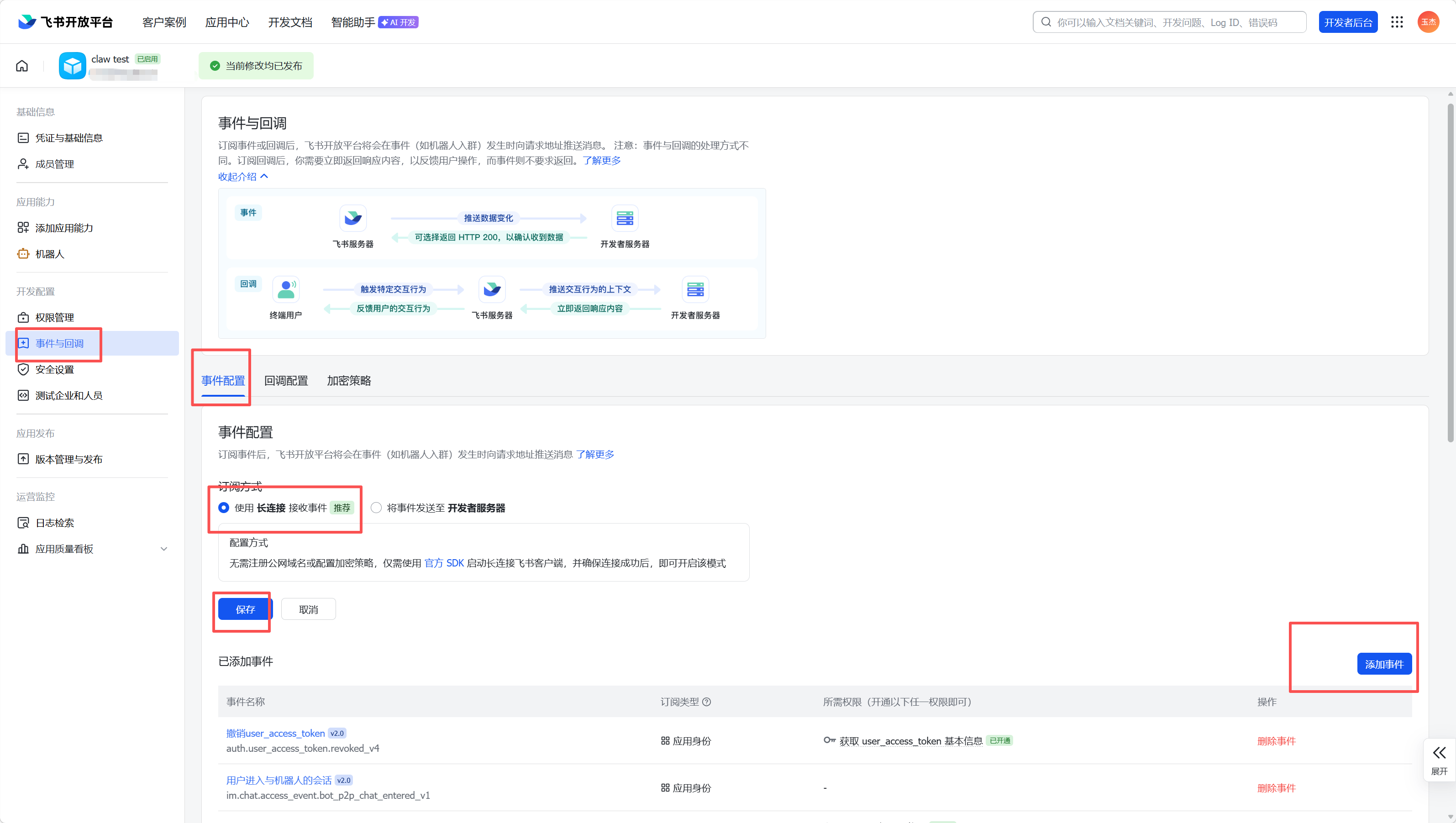
restart设置飞书回调
完成上述操作后,mimi claw即可顺利接入飞书平台。接下来需在飞书中配置回调事件功能:进入"添加事件"界面,勾选"消息与群组"分类下的全部选项即可完成设置。之后重新发布版本。
结语
现在应该就可以愉快的和你的机器人聊天了!!!
以下是文中所有用到的链接:

Agent 垂直技术社区,欢迎活跃、内容共建。
更多推荐

 16
16 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)