哈工大团队|一文详解大模型时代下的具身智能(附下载)
哈工大团队|一文详解大模型时代下的具身智能(附下载)
一、具身智能的核心概念
-
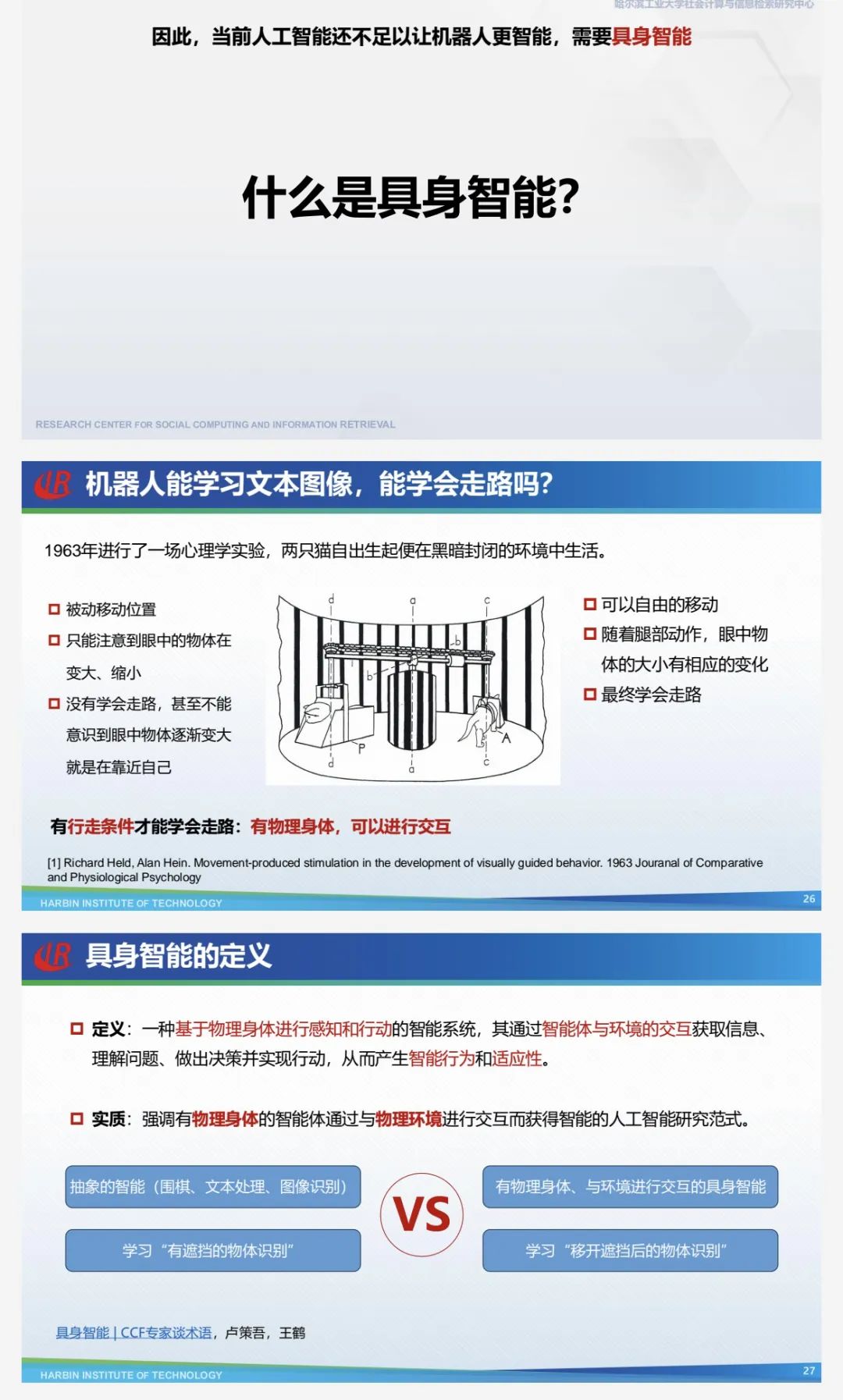
定义:
-
基于物理身体的智能系统,通过与环境的主动交互获得信息、做出决策并执行行动。
-
核心能力:交互中学习(如1963年猫实验表明行动对感知发展的必要性)。
-
-
与通用AI的区别:
-
强调物理实体和环境交互,非仅屏幕后的数据分析;需同时解决感知、推理、执行三方面问题。
-
二、具身智能技术框架
(一)具身感知
- 物体感知
- 几何形状
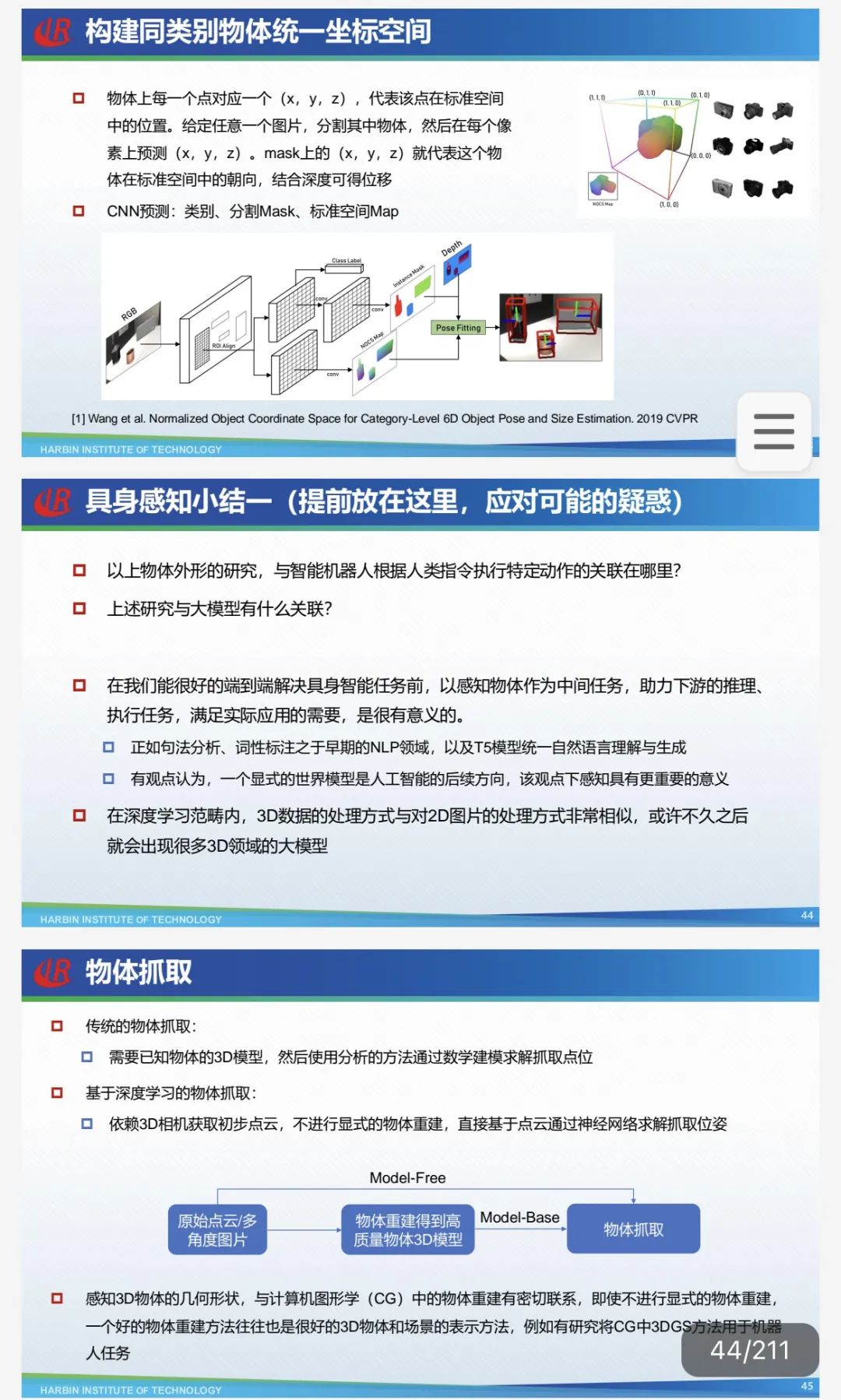
通过点云(PointNet++)、体素(VoxelNet)、网格(MeshNet)、SDF(DeepSDF)等建模物体3D形态。
- 铰接结构
解析可动部件的运动参数(如旋转轴、平移方向),关键方法包括UMPNet、交互式URDF参数优化。
- 物理属性
触觉、力矩传感器获取材质、硬度等信息,结合强化学习优化操作(如T-NT穿针任务)。
- 下游任务
位姿估计(NOCS)、抓取规划(Anygrasp、CoPA)、交互感知与可供性预测。
- 几何形状
- 场景感知
- 物体识别
通过多视角观察(Seeing by Moving)或物理交互提升准确性。
- 时空推理
检测变化(PSG-4D模型)、推断物体关系(Scene Graphs),支持动态场景适应。
- 重建技术
传统SLAM与深度学习融合,如CNN-SLAM提升深度预测;主动映射(选择最优视角)与定位(RL优化路径)。
- 物体识别
- 行为感知
- 手势识别
视觉分割+关节点检测,应用于交互控制。
- 人体姿态估计
单人/多人姿态预测(热图法、自顶向下/自底向上),服务于社交导航防碰撞。
- 行为理解
运动轨迹预测(RNN)、语言-动作联合建模(MotionGPT),提升人机协作安全性。
- 手势识别
- 表达感知
融合面部表情(LBP特征)、语音情感分析,用于意图识别(如服务机器人情感响应)。
(二)具身推理
任务规划依赖大模型(如GPT-4V),但EgoPlan-Val数据集显示其准确率仅37.98%,需结合物理规则和小模型优化。
(三)具身执行
- 运动控制
成熟技术(如波士顿动力Atlas的关节控制)。
- 泛化短板
技能库覆盖有限,小模型(扩散模型)虽高成功率但泛化差,大模型需提升指令转为动作的可靠性。
三、关键挑战与未来方向
-
挑战:
- 感知
复杂场景下的多模态融合(如遮挡、动态光照)。
- 推理
大模型物理常识不足,规划结果与实际运动存在偏差。
- 执行
动作成功率(60%-70%)和流畅度待提升。
- 感知
-
趋势:
- 3D大模型
点云/体素数据的高效处理,推动端到端感知-执行框架。
- 交互式学习
仿生学启发的主动探索策略(如猫实验)。
- 多智能体协作
多机器人协同的场景理解与任务分配。
- 3D大模型
四、总结
具身智能是实现通用机器人的关键技术路径,其核心在于物理实体与环境的交互闭环。当前研究在感知建模(如铰接物体理解)、多模态融合(视觉-触觉)取得进展,但推理与执行的泛化能力仍是瓶颈。未来需结合大模型的知识泛化与小模型的物理精准性,并探索Sim2Real、自监督学习等方法,最终迈向具身通用人工智能。
文档部分一览:

如何系统的去学习大模型LLM ?
大模型时代,火爆出圈的LLM大模型让程序员们开始重新评估自己的本领。 “AI会取代那些行业?”“谁的饭碗又将不保了?”等问题热议不断。
事实上,抢你饭碗的不是AI,而是会利用AI的人。
继科大讯飞、阿里、华为等巨头公司发布AI产品后,很多中小企业也陆续进场!超高年薪,挖掘AI大模型人才! 如今大厂老板们,也更倾向于会AI的人,普通程序员,还有应对的机会吗?
与其焦虑……
不如成为「掌握AI工具的技术人」,毕竟AI时代,谁先尝试,谁就能占得先机!
但是LLM相关的内容很多,现在网上的老课程老教材关于LLM又太少。所以现在小白入门就只能靠自学,学习成本和门槛很高。
基于此,我用做产品的心态来打磨这份大模型教程,深挖痛点并持续修改了近70次后,终于把整个AI大模型的学习门槛,降到了最低!
在这个版本当中:
第一您不需要具备任何算法和数学的基础
第二不要求准备高配置的电脑
第三不必懂Python等任何编程语言
您只需要听我讲,跟着我做即可,为了让学习的道路变得更简单,这份大模型教程已经给大家整理并打包,现在将这份 LLM大模型资料 分享出来:包括LLM大模型书籍、640套大模型行业报告、LLM大模型学习视频、LLM大模型学习路线、开源大模型学习教程等, 😝有需要的小伙伴,可以 扫描下方二维码领取🆓↓↓↓

一、LLM大模型经典书籍
AI大模型已经成为了当今科技领域的一大热点,那以下这些大模型书籍就是非常不错的学习资源。

二、640套LLM大模型报告合集
这套包含640份报告的合集,涵盖了大模型的理论研究、技术实现、行业应用等多个方面。无论您是科研人员、工程师,还是对AI大模型感兴趣的爱好者,这套报告合集都将为您提供宝贵的信息和启示。(几乎涵盖所有行业)
三、LLM大模型系列视频教程

四、LLM大模型开源教程(LLaLA/Meta/chatglm/chatgpt)

五、AI产品经理大模型教程

LLM大模型学习路线 ↓
阶段1:AI大模型时代的基础理解
-
目标:了解AI大模型的基本概念、发展历程和核心原理。
-
内容:
- L1.1 人工智能简述与大模型起源
- L1.2 大模型与通用人工智能
- L1.3 GPT模型的发展历程
- L1.4 模型工程
- L1.4.1 知识大模型
- L1.4.2 生产大模型
- L1.4.3 模型工程方法论
- L1.4.4 模型工程实践
- L1.5 GPT应用案例
阶段2:AI大模型API应用开发工程
-
目标:掌握AI大模型API的使用和开发,以及相关的编程技能。
-
内容:
- L2.1 API接口
- L2.1.1 OpenAI API接口
- L2.1.2 Python接口接入
- L2.1.3 BOT工具类框架
- L2.1.4 代码示例
- L2.2 Prompt框架
- L2.3 流水线工程
- L2.4 总结与展望
阶段3:AI大模型应用架构实践
-
目标:深入理解AI大模型的应用架构,并能够进行私有化部署。
-
内容:
- L3.1 Agent模型框架
- L3.2 MetaGPT
- L3.3 ChatGLM
- L3.4 LLAMA
- L3.5 其他大模型介绍
阶段4:AI大模型私有化部署
-
目标:掌握多种AI大模型的私有化部署,包括多模态和特定领域模型。
-
内容:
- L4.1 模型私有化部署概述
- L4.2 模型私有化部署的关键技术
- L4.3 模型私有化部署的实施步骤
- L4.4 模型私有化部署的应用场景
这份 LLM大模型资料 包括LLM大模型书籍、640套大模型行业报告、LLM大模型学习视频、LLM大模型学习路线、开源大模型学习教程等, 😝有需要的小伙伴,可以 扫描下方二维码领取🆓↓↓↓

Agent 垂直技术社区,欢迎活跃、内容共建。
更多推荐

 27
27 0
0- 0



 已为社区贡献106条内容
已为社区贡献106条内容

所有评论(0)