CoMAL: Collaborative Multi-Agent Large Language Models for Mixed-Autonomy Traffic
概述:CoMAL是一个框架,利用协作大型语言模型通过增强自主驾驶和人类驾驶车辆之间的决策和合作,优化混合自主环境中的交通流量,在各种交通场景中优于传统的强化学习方法。

CoMAL:协作多智能体大型语言模型用于混合自主交通
🎯 推荐指数:🌟🌟🌟
📖 title:CoMAL: Collaborative Multi-Agent Large Language Models for Mixed-Autonomy Traffic
🔥 code:https://github.com/Hyan-Yao/CoMAL
🌟 概述:CoMAL是一个框架,利用协作大型语言模型通过增强自主驾驶和人类驾驶车辆之间的决策和合作,优化混合自主环境中的交通流量,在各种交通场景中优于传统的强化学习方法。
🔍 解决的问题:
本文旨在解决与混合自主交通系统相关的以下问题:
-
任务优化
- 本文主要任务是优化自主车辆(CAVs)与人驾驶车辆共存环境中的交通流动。框架CoMAL旨在增强这些车辆之间的决策和协作,以提高整体交通效率。
-
当前困难
- 复杂动态:混合自主交通由于自主车辆与人驾驶车辆之间不可预测的互动,带来了显著挑战。交通动态可能导致拥堵和停走波的形成,这些问题难以有效管理。
- 泛化限制:传统的强化学习(RL)方法由于依赖大量特定的训练数据,往往难以在不同交通场景中进行泛化。这限制了它们对新型和多样化交通条件的适应能力。
- 沟通缺口:车辆之间需要有效的沟通与协作,以协调行动并优化交通流动。目前的系统可能缺乏车辆共享信息和做出集体决策所需的框架。
-
研究动机
- 本研究的动机源于将自主车辆整合到城市交通系统中的潜在好处。通过利用大型语言模型(LLMs)的推理和决策能力,研究旨在解决现有数据驱动方法的局限性,并增强自主车辆与人驾驶车辆之间的互动。目标是创建一个更高效和合作的交通环境,以适应复杂动态并改善整体交通管理。
👉文章方法:
本文提出了CoMAL框架,即协作多智能体大型语言模型。以下是文中概述的关键方法:
-
协作多智能体框架
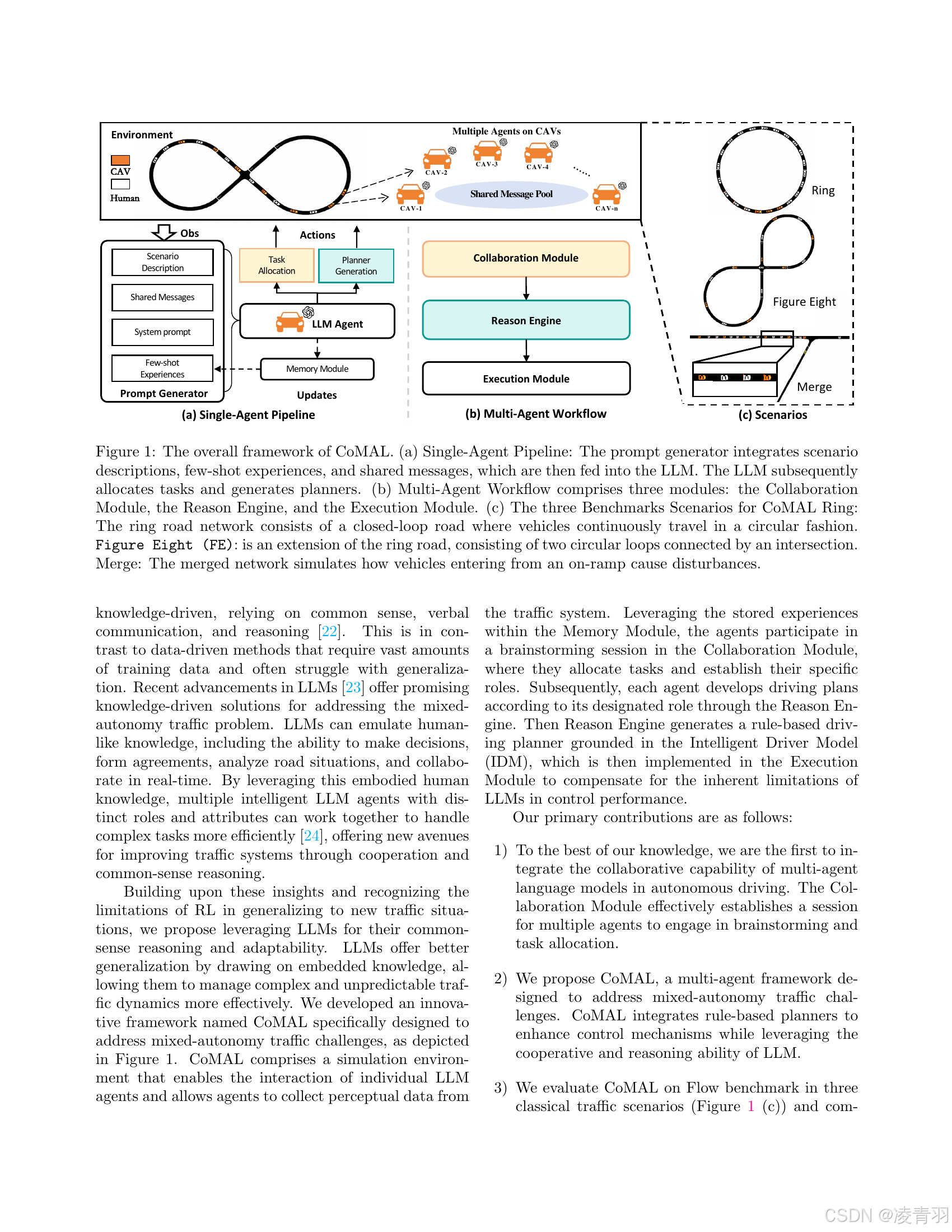
描述: CoMAL整合了多个自主车辆(CAVs),利用大型语言模型(LLMs)在混合自主交通环境中有效协作。该框架通过利用LLMs的推理和适应能力,增强了车辆之间的决策和沟通,优化了交通流。 -
感知模块
描述: 该模块负责情境感知,使车辆能够观察和解读周围环境。它收集关于自我车辆和周围智能体运动的动态信息,这对知情决策和规划至关重要。 -
记忆模块
描述: 记忆模块存储每个智能体的策略和过去经验。这些存储的知识在协作过程中被利用,以指导决策并提高智能体在各种交通场景中的有效性。 -
协作模块
描述: 该模块促进智能体之间的头脑风暴会议,使它们能够讨论策略、分配任务并定义各自的角色。它建立了一个共享信息池,以提高沟通效率,确保所有智能体在目标上保持一致。 -
执行模块
描述: 执行模块实现智能体生成的驾驶计划。它采用一种混合方法,将基于规则的模型与LLMs的输出结合起来,以控制车辆行为,确保协调的驾驶行为和顺畅的交通流。 -
推理引擎
描述: 推理引擎处理来自协作模块的信息,并根据每个智能体的分配角色生成驾驶计划。它采用分层的思维链过程,包括角色澄清、场景理解、运动指令和规划生成,最终生成基于智能驾驶模型(IDM)的规则驱动规划器。 -
实验评估
描述: 通过在各种交通场景中与传统强化学习(RL)方法进行广泛实验,评估框架的性能。结果显示在平均速度和驾驶平稳性方面有显著改善,展示了CoMAL在管理复杂交通动态方面的有效性。
这些方法共同为CoMAL在应对混合自主交通系统挑战方面提供了创新的解决方案。
每日Paper内容分享:关注小红书《AI届吗喽》



Agent 垂直技术社区,欢迎活跃、内容共建。
更多推荐

 6
6 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)