
【多智能体系统】基于蚂蚁优化算法、Dijkstra算法、模型预测控制MPC的路径规划与轨迹跟踪算法研究(Matlab代码实现)
💥💥💞💞❤️❤️💥💥博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。⛳️行百里者,半于九十。📋📋📋🎁🎁🎁。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
基于蚂蚁优化算法(ACO)、Dijkstra算法和模型预测控制(MPC)的多智能体系统路径规划与轨迹跟踪研究
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
基于蚂蚁优化算法(ACO)、Dijkstra算法和模型预测控制(MPC)的多智能体系统路径规划与轨迹跟踪研究
一、各算法基本原理及在路径规划与轨迹跟踪中的应用
- 蚂蚁优化算法(ACO)
ACO模拟蚂蚁觅食行为,通过信息素正反馈机制寻找最优路径。其核心步骤包括:- 路径构建:蚂蚁根据信息素浓度(τijτij)和启发式信息(如距离倒数1/dij1/dij)概率选择路径,公式为:
- 路径构建:蚂蚁根据信息素浓度(τijτij)和启发式信息(如距离倒数1/dij1/dij)概率选择路径,公式为:
其中,α和β分别控制信息素与启发式信息的权重。
- 信息素更新:路径质量越高(如路径更短),信息素增强越多,同时通过蒸发系数ρρ避免局部最优。
- 应用场景:ACO在机器人路径规划、物流配送(如TSP问题)中表现出色,但需参数调优且计算复杂度随问题规模增大。
-
Dijkstra算法
Dijkstra算法通过贪心策略寻找单源最短路径,适用于静态环境:- 流程:初始化节点距离为无穷大,逐步更新最短路径,时间复杂度为O(n2)O(n2)。
- 局限性:无法处理动态障碍物,且在大规模图中效率较低。
- 改进方向:与启发式算法(如A*)或ACO结合,提升动态环境适应性。
-
模型预测控制(MPC)
MPC基于动态模型滚动优化控制输入,实现轨迹跟踪:- 核心机制:在每个控制周期内预测未来状态,优化目标函数(如跟踪误差、控制能量)并施加约束(如转向角、速度限制)。
- 优势:鲁棒性强,可处理非线性模型和实时干扰,适用于车辆、无人机等动态轨迹跟踪。
- 挑战:计算复杂度高,需高性能硬件支持。
二、多智能体系统中的协同研究现状
- ACO与Dijkstra的混合路径规划
- 策略:Dijkstra快速生成初始路径,ACO优化全局信息素分布,提升搜索效率。例如:
- 在消防疏散中,Dijkstra提供次优路径作为ACO的初始解,避免ACO早期盲目搜索。
- 煤矿逃生场景下,混合算法路径长度比A*缩短19%,避障率提升5%。
- 参数优化:通过自适应调整αα、ββ、ρρ等参数,平衡探索与开发能力。
-
MPC与路径规划算法的集成
- 局部路径规划:MPC结合车辆动力学模型,实时调整路径以避开动态障碍物。例如,无人船通过线性/非线性MPC模型实现高精度轨迹跟踪。
- 多目标优化:将路径长度、安全性、能耗等目标融入MPC代价函数,生成兼顾多约束的轨迹。
- 案例:双轮无人车在MPC控制下,50秒内成功跟踪圆形参考轨迹,转向角收敛至4.13度。
-
多智能体协同的挑战与解决方案
- 冲突避免:多智能体路径规划(MAPF)需解决顶点冲突(同一时间占用同一节点)和边冲突(路径交叉)。
- 通信限制:动态领导机制(如重新选择领导者)提升密集环境中的协调能力。
- 实时性:采用分布式并行ACO框架(如MPI+OpenMP),384核下实现超线性加速。
三、关键挑战与未来方向
-
动态环境适应性
- 动态障碍物和实时环境变化要求算法具备快速重规划能力,ACO需与实时传感器数据结合。
- MPC需集成环境预测模型(如DBN威胁评估),提升路径安全性。
-
算法协调与计算效率
- 混合算法需平衡全局优化(ACO)与局部实时调整(MPC)的冲突,例如分层架构:ACO规划全局路径,MPC处理局部跟踪。
- 并行计算(如GPU加速)和轻量化模型(如深度强化学习)可降低MPC的计算负载。
-
多目标优化与鲁棒性
- 引入多目标优化框架(如NSGA-II),同时优化路径长度、能耗和冲突风险。
- 强化学习(RL)与ACO结合,通过奖励机制引导多智能体协作。
四、结论
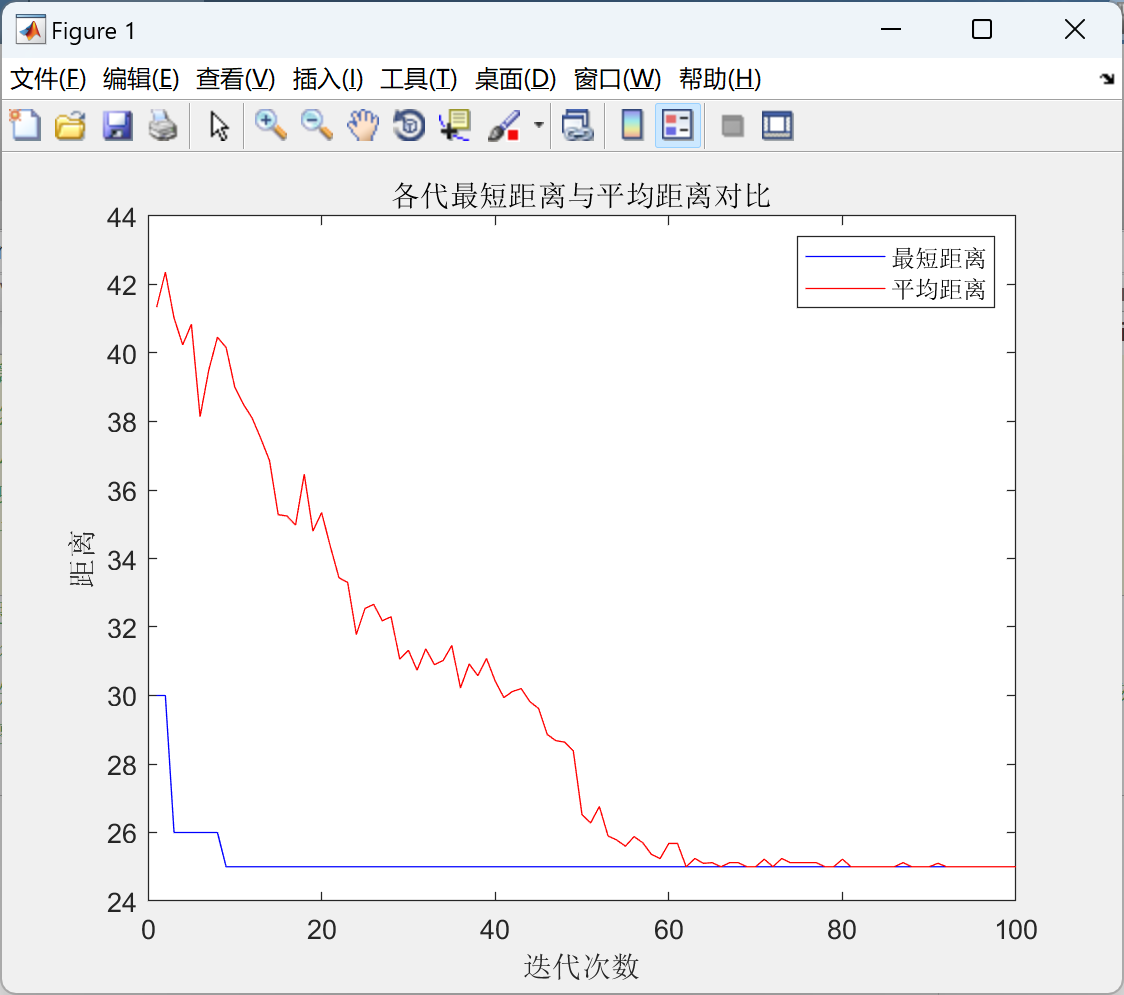
ACO、Dijkstra和MPC在多智能体系统中的协同应用展现了显著潜力:ACO提供全局优化能力,Dijkstra加速初始解生成,MPC确保动态轨迹跟踪。然而,动态环境下的实时性、冲突协调及计算效率仍是核心挑战。未来研究可聚焦于自适应参数调整、分布式架构设计以及跨算法融合(如ACO-MPC深度强化学习框架),以推动多智能体系统在自动驾驶、物流机器人等领域的实用化突破。
📚2 运行结果
部分代码:
%% 参数设置
Kp = 1.0;
dt = 0.1;
L = 2.9;
max_steer = 60 * pi / 180;
target_v = 40 / 3.6;
%% 轨迹处理
% 定义参考轨迹
refPos_x = path(:, 1);
refPos_y = path(:, 2);
refPos = [refPos_x, refPos_y];
% 计算一阶导数
for i = 1 : length(refPos_x) - 1
refPos_d(i) = (refPos(i + 1, 2) - refPos(i, 2)) / (refPos(i + 1, 1) - refPos(i, 1));
end
refPos_d(end + 1) = refPos_d(end);
% 计算二阶导数
for i = 2 : length(refPos_x) - 1
refPos_dd(i) = (refPos(i + 1, 2) - 2 * refPos(i, 2) + refPos(i - 1, 2)) / (0.5*(-refPos(i - 1, 1) + refPos(i, 1))^2 + (refPos(i + 1, 1) - refPos(i, 1))^2);
end
refPos_dd(1) = refPos_dd(2);
refPos_dd(length(refPos_x)) = refPos_dd(length(refPos_x) - 1);
% 计算曲率
for i = 1 : length(refPos_x) - 1
k(i) = (refPos_dd(i)) / (1 + refPos_d(i)^2)^(1.5);
end
refPos_x = refPos_x';
refPos_y = refPos_y';
refPos_yaw = atan(refPos_d');
refPos_k = k';
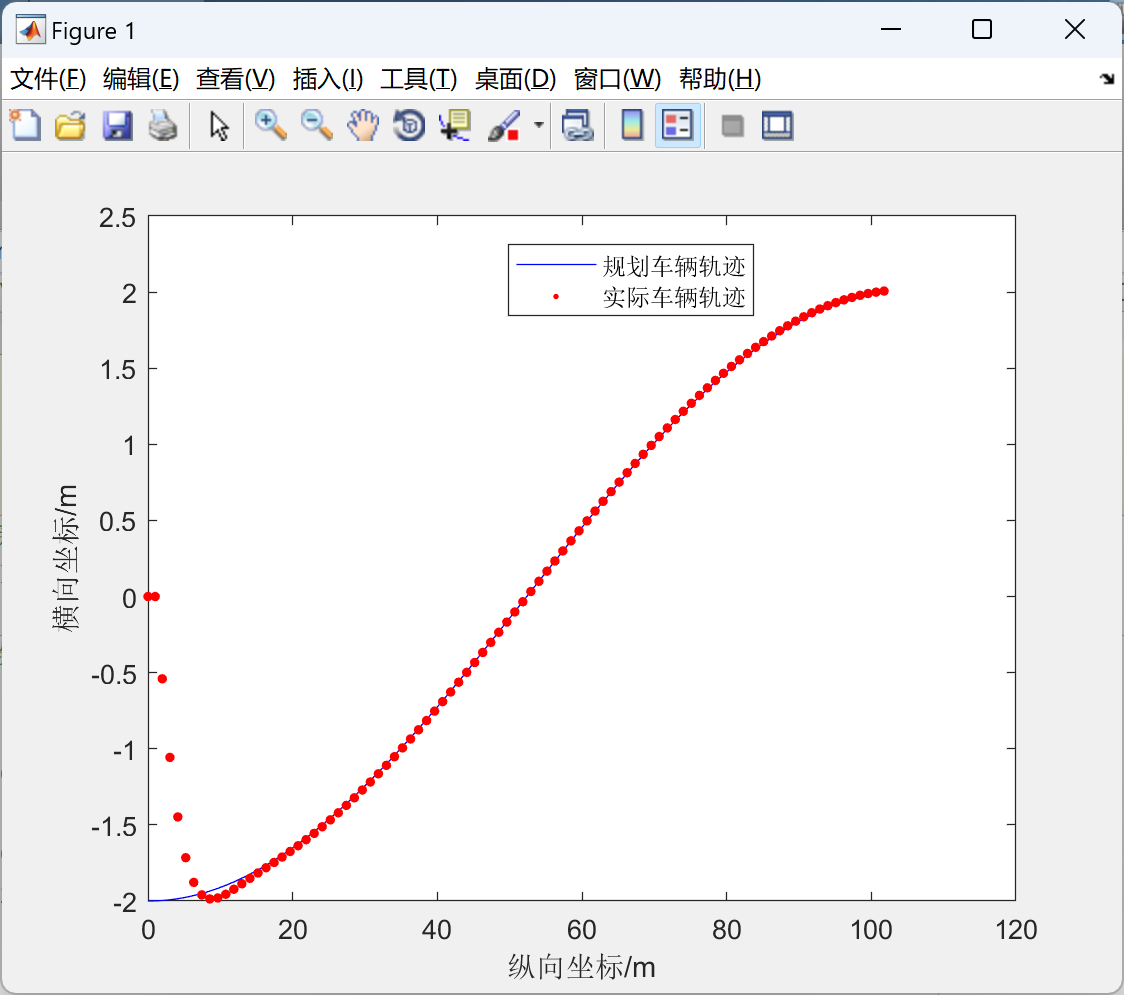
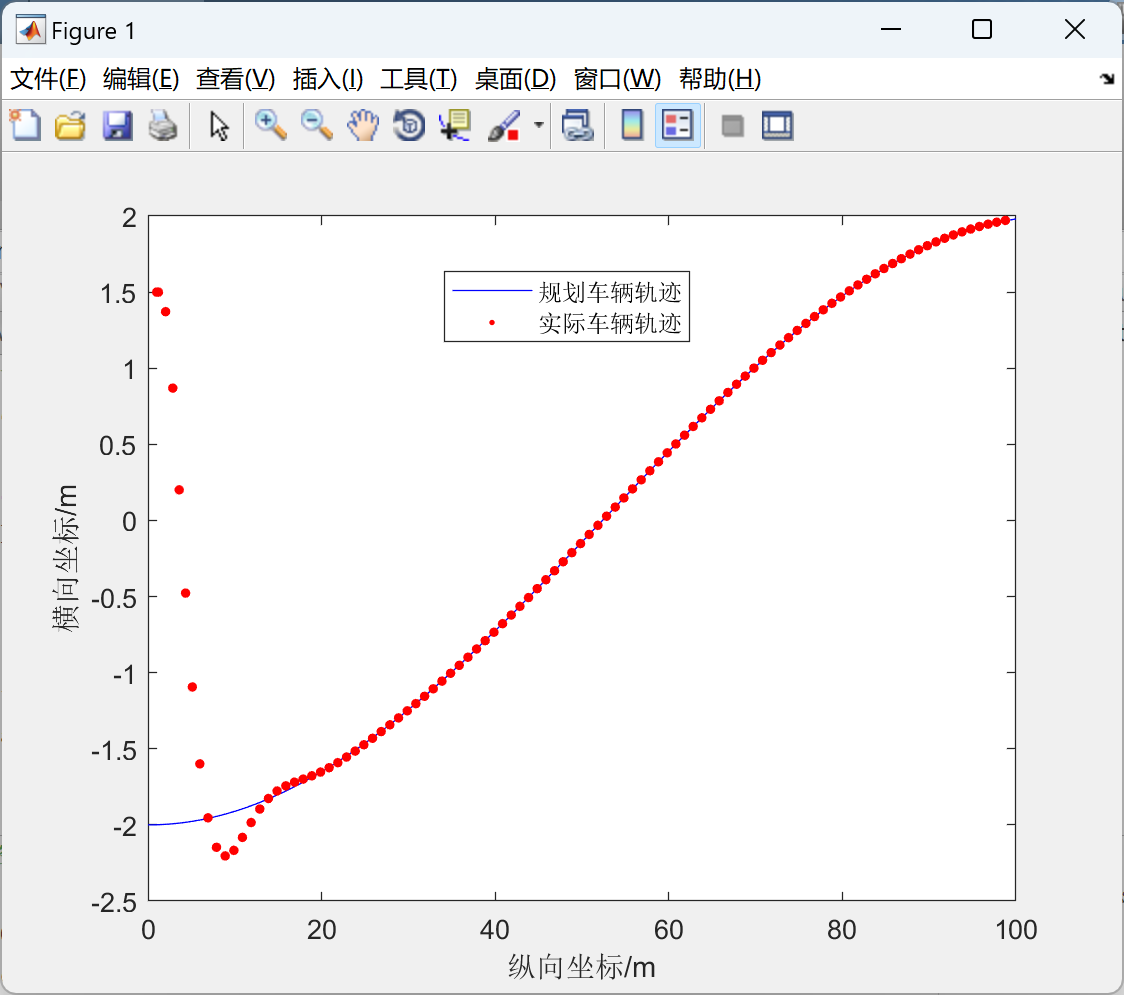
%% 绘图
figure
plot(path(:, 1), path(:, 2), 'b');
xlabel('纵向坐标/m');
ylabel('横向坐标/m');
hold on;
%% 主程序
x = 0.1;
y = -0.1;
yaw = 0.1;
v = 0.1;
U = [0.01; 0.01];
pos_actual = [x, y];
ind = 0;
while ind < length(refPos_x)
% 调节MPC控制器
[Delta, v, ind, e, U] = MPC_Control(x, y, yaw, refPos_x, refPos_y, refPos_yaw, refPos_k, dt, L, U, target_v);
% 误差太大,退出程序
if abs(e) > 3
fprintf('误差过大,退出程序!\n');
break;
end
% 速度P控制器
a = Kp * (target_v - v);
% 更新状态变量
[x, y, yaw, v] = updateState(x, y, yaw, v, a, Delta, dt, L, max_steer);
pos_actual(end + 1, :) = [x, y];
% 画跟踪轨迹图
plot(x, y, 'ro');
pause(0.01);
end
%% 保存
path_MPC = pos_actual;
save path_MPC.mat path_MPC;
%% 更新状态变量
%% 算法初始化
% S/U的第一列表示节点编号
% 对于S,第二列表示从源节点到本节点已求得的最小距离,不会更新
% 对于U,第二列表示从源节点到本节点暂时求得的最小距离,可能会更新
S = [4, 0];
U(:, 1) = [1, 2, 3, 5, 6, 7];
U(:, 2) = [inf, inf, 3, 4, inf, inf];
% 最优路径及短暂最优路径的初始化
% 第一列表示节点编号
% 第二列表示从源节点到本节点的路径
path_opt = cell(7, 2);
path_opt(4,:) = {4, 4};
path_temp = cell(7, 2);
path_temp(3,:) = {3, [4, 3]};
path_temp(4,:) = {4, 4};
path_temp(5,:) = {5, [4, 5]};
%% 循环遍历所有节点
while ~isempty(U)
% 在U集合中找出当前最小距离值及其对应的节点编号,并移除该节点至S集合中
[distMin, indexMin] = min(U(:, 2));
nodeMin = U(indexMin, 1);
S(end+1, :) = [nodeMin, distMin];
U(indexMin,:) = [];
% 将最小距离节点添加到最优路径集合
path_opt(nodeMin,:) = path_temp(nodeMin, :);
% 依次遍历最小距离节点的邻近节点,判断是否在U集合中更新邻近节点的距离值
for i = 1 : length(nodes{nodeMin, 2})
% 需要判断的节点
nodeTemp = nodes{nodeMin, 2}(i);
% 找到U集合中节点nodeTemp的索引值
indexTemp = find(nodeTemp == U(:, 1));
% 判断是否更新
if ~isempty(indexTemp)
if distMin + nodes{nodeMin, 3}(i) < U(indexTemp, 2)
U(indexTemp, 2) = distMin + nodes{nodeMin, 3}(i);
% 更新暂时最优路径
path_temp{nodeTemp, 1} = nodeTemp;
path_temp{nodeTemp, 2} = [path_opt{nodeMin, 2}, nodeTemp];
end
end
end
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]李满.移动机器人环境建模与路径规划的研究[D].燕山大学,2012.
[2]邱莉莉.基于改进蚁群算法的机器人路径规划[D].东华大学,2015.
[3]袁杨,陈雄.基于群集智能算法的移动机器人路径规划研究[J].计算机工程与应用, 2007(05):56-59.
[4]徐靖贤.无人驾驶轨迹规划与跟踪控制关键技术研究[D].长安大学,2023.
[5]苏凯.智能车辆主动避撞路径规划与跟踪控制方法研究[D].大连理工大学[2025-02-26].
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


Agent 垂直技术社区,欢迎活跃、内容共建,欢迎商务合作。wx: diudiu5555
更多推荐


 10
10 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)