【Paper】2017_带有滑模观测器的多智能体一致性控制_金治群
2017_带有滑模观测器的多智能体一致性控制_金治群文章目录1 引言2 预备知识2.1 有限时间稳定性2.2 图论3 问题描述4 滑模观测器设计5 基于非奇异终端滑模的一致性控制6 数值仿真1 引言2 预备知识2.1 有限时间稳定性2.2 图论3 问题描述该多智能体系统中所有 follower 的模型都为 Euler-Lagrange 系统,即{Mi(qi) q¨i=fi(qi(t),q
2017_带有滑模观测器的多智能体一致性控制_金治群
| q i q_i qi | 智能体位置向量 | |
| M i M_i Mi | 正定矩阵、惯性矩阵 | |
| f i f_i fi | 科氏力、离心力、保守力、非保守力 | |
| u i u_i ui | 控制输入 | |
| g i g_i gi | 有界不确定性 | |
| l i j l_{ij} lij | 智能体之间的相对位置 | |
| z i ( t ) z_i(t) zi(t) | 位置误差 | |
| ξ i ( t ) \xi_i(t) ξi(t) | 位置的估计 | |
| ς i ( t ) \varsigma_i(t) ςi(t) | 速度的估计 | |
| z ^ i ( t ) \hat{z}_i(t) z^i(t) | 位置误差的估计 |
1 引言
2 预备知识
2.1 有限时间稳定性
2.2 图论
3 问题描述
该多智能体系统中所有 follower 的模型都为 Euler-Lagrange 系统,即
{ M i ( q i ) q ¨ i = f i ( q i ( t ) , q ˙ i ( t ) ) + u i ( t ) + g i ( q i ( t ) , q ˙ i ( t ) ) , q i ( 0 ) = q 0 i , q ˙ i ( 0 ) = q ˙ 0 i , (5) \left\{\begin{aligned} &M_i(q_i) ~ \ddot{q}_i = f_i(q_i(t), \dot{q}_i(t)) + u_i(t) + g_i(q_i(t), \dot{q}_i(t)), \\ &q_i(0) = q_{0i}, \\ &\dot{q}_i(0) = \dot{q}_{0i}, \\ \end{aligned}\right. \tag{5} ⎩
⎨
⎧Mi(qi) q¨i=fi(qi(t),q˙i(t))+ui(t)+gi(qi(t),q˙i(t)),qi(0)=q0i,q˙i(0)=q˙0i,(5)
位置误差向量
z i ( t ) = q i ( t ) − 1 ∣ J i ∣ ∑ j ∈ J i ( q j ( t ) + l i j ( t ) ) (8) z_i(t) = q_i(t) - \frac{1}{|J_i|} \sum_{j \in J_i} (q_j(t) + l_{ij}(t)) \tag{8} zi(t)=qi(t)−∣Ji∣1j∈Ji∑(qj(t)+lij(t))(8)
4 滑模观测器设计
由于所有 follower 的速度信息都不可测,本文设计(9a)和(9b)所示的有限时间滑模观测器分别估计每个 follower 的速度信息:
ξ ˙ i ( t ) = ς i ( t ) + λ sig 1 2 ( q i ( t ) − ξ i ( t ) ) (9a) \dot{\xi}_i(t) = \varsigma_i(t) + \lambda \text{sig}^{\frac{1}{2}}(q_i(t) - \xi_i(t)) \tag{9a} ξ˙i(t)=ςi(t)+λsig21(qi(t)−ξi(t))(9a) ς ˙ i ( t ) = u ~ i ( t ) + f ~ i ( q i , ς i ) + α sgn ( q i ( t ) − ξ i ( t ) ) (9b) \dot{\varsigma}_i(t) = \tilde{u}_i(t) + \tilde{f}_i(q_i, \varsigma_i) + \alpha \text{sgn}(q_i(t) - \xi_i(t)) \tag{9b} ς˙i(t)=u~i(t)+f~i(qi,ςi)+αsgn(qi(t)−ξi(t))(9b)
e q i = q i ( t ) − ξ i ( t ) (10a) e_{qi} = q_i(t) - \xi_i(t) \tag{10a} eqi=qi(t)−ξi(t)(10a)
5 基于非奇异终端滑模的一致性控制
位置误差的估计量
z ^ i ( t ) = ξ i ( t ) + ( L i L ⊗ I n ) ( q L ( t ) + l i L ( t ) ) − 1 ∣ J i ∣ ∑ j ∈ J i / { L } ( ξ j ( t ) + l i j ( t ) ) (22) \begin{aligned} \hat{z}_i(t) &= \xi_i(t) + (L_{iL} \otimes I_n)(q_L(t) + l_{iL}(t)) \\ &- \frac{1}{|J_i|} \sum_{j \in J_i/\{L\}} (\xi_j(t) + l_{ij}(t)) \end{aligned}\tag{22} z^i(t)=ξi(t)+(LiL⊗In)(qL(t)+liL(t))−∣Ji∣1j∈Ji/{L}∑(ξj(t)+lij(t))(22)
z ^ ˙ i ( t ) = ς i ( t ) + λ sig 1 2 ( e q i ) + L i L ( q ˙ L + l ˙ i L ) − 1 ∣ J i ∣ ∑ j ∈ J i / { L } ( ς j ( t ) + λ sig 1 2 ( e q i ) + l ˙ i j ) (23) \begin{aligned} \dot{\hat{z}}_i(t) &= \varsigma_i(t) +\lambda \text{sig}^{\frac12}(e_{qi}) + L_{iL}(\dot{q}_L + \dot{l}_{iL}) \\ &- \frac{1}{|J_i|} \sum_{j \in J_i/\{L\}} (\varsigma_j(t) +\lambda \text{sig}^{\frac12}(e_{qi})+ \dot{l}_{ij}) \end{aligned}\tag{23} z^˙i(t)=ςi(t)+λsig21(eqi)+LiL(q˙L+l˙iL)−∣Ji∣1j∈Ji/{L}∑(ςj(t)+λsig21(eqi)+l˙ij)(23)
终端滑模面为
s i ( t ) = z ^ i ( t ) + β z ^ ˙ i γ ( t ) (25) s_i(t) = \hat{z}_i(t) + \beta \dot{\hat{z}}_i^\gamma(t) \tag{25} si(t)=z^i(t)+βz^˙iγ(t)(25)
设计控制律为
u ~ i ( t ) = − ( η sgn s i + β − 1 ) (27) \begin{aligned} \tilde{u}_i(t) &= - (\eta ~ \text{sgn} ~ \mathbf{s}_i + \beta^{-1}) \end{aligned}\tag{27} u~i(t)=−(η sgn si+β−1)(27)
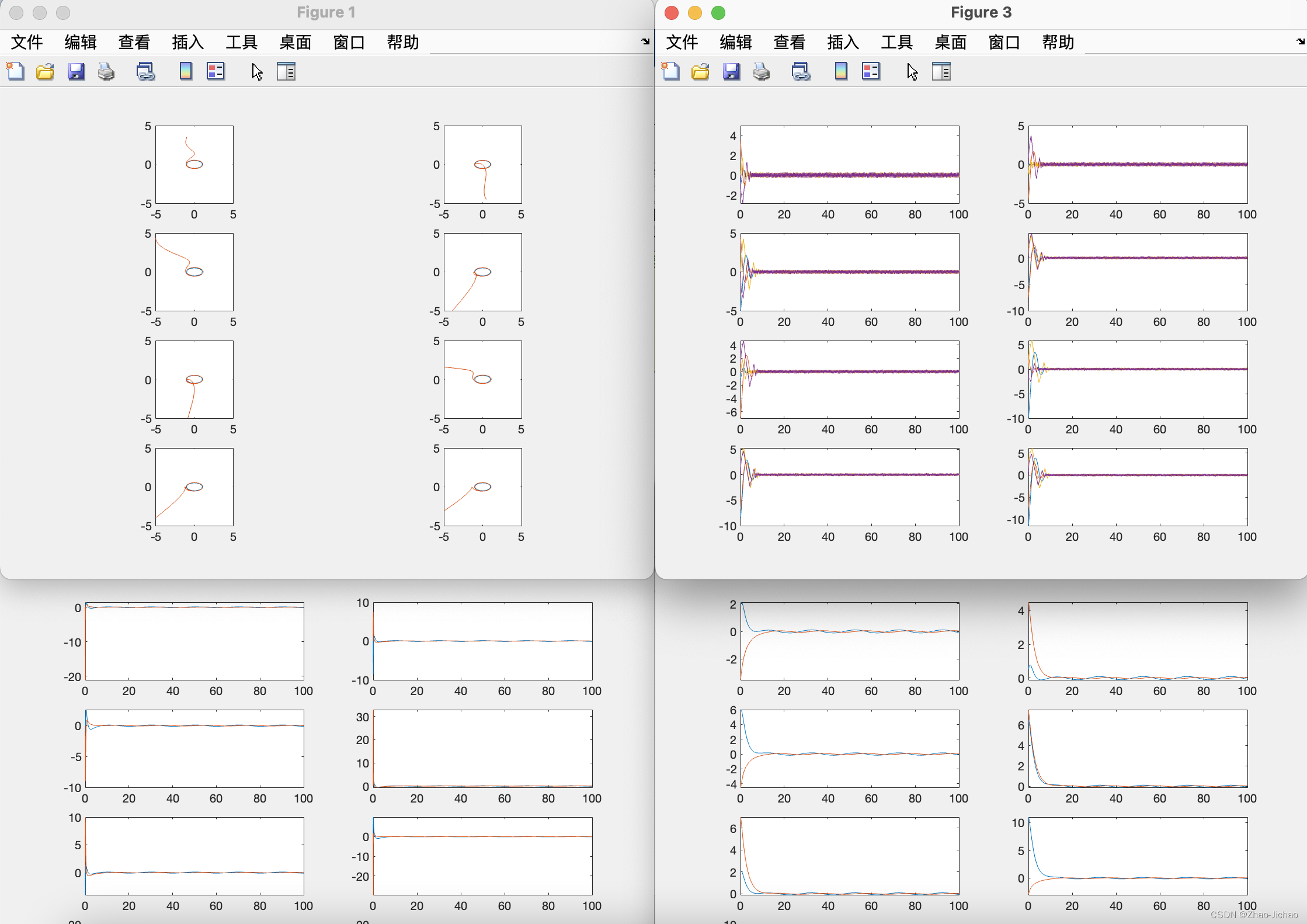
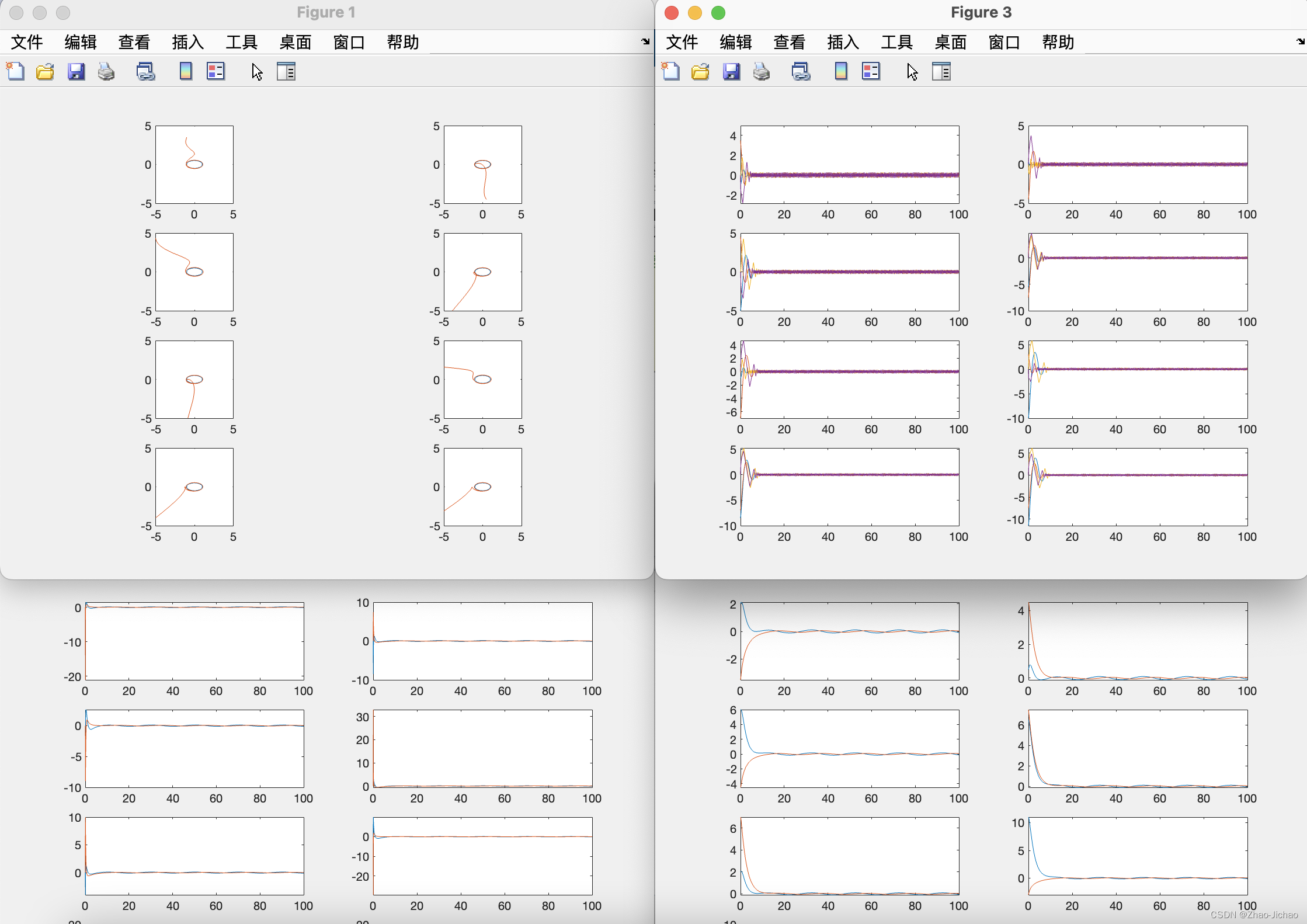
6 数值仿真
没有用原文的控制器,自己修改了一下

Agent 垂直技术社区,欢迎活跃、内容共建,欢迎商务合作。wx: diudiu5555
更多推荐


 1
1 0
0- 0



 已为社区贡献40条内容
已为社区贡献40条内容

所有评论(0)