【Unity】使用RootMotion跟运动驱动NavMeshAgent导航
【Unity】NavMeshAgent与Animator及RootMotion的配合Unity目前(2019.4)还没有内置开箱即用的将导航与动画整合的方案,这里提供了一个将NavMeshAgent和Animator整合的思路,并且兼容了RootMotion。实现NavMeshAgent和Animator整合时,主要需要解决滑步问题和NavMeshAgent与RootMotion的数据同步问题,在
【Unity】使用RootMotion跟运动驱动NavMeshAgent导航
Unity目前(2020.3)还没有内置开箱即用的将导航与动画整合的方案,这里提供了一个将NavMeshAgent和带RootMotion跟运动的Animator整合的思路,利用RootMotion来驱动导航。
通过RootMotion来使角色向目标点移动,无需担心滑步问题,但需要处理RootMotion数据和NavMeshAgent数据的同步。数据同步过程在 OnAnimatorMove() 方法中执行,主要步骤是:① 禁用NavMeshAgent组件的位置更新(agent.updatePosition = false);② 将RootMotion数据应用到NavMeshAgent组件中,驱动NavMeshAgent更新状态和进行导航模拟(agent.velocity = animator.velocity);③ 【可选】将导航模拟结果设置回角色的Transform上,避免RootMotion将角色移动到导航不可达区域(animator.transform.position = agent.nextPosition)。另外,需要在角色转身时对其移动速度进行衰减处理,以免当角色RootMotion速度太快并且目标点在角色身后附近时,角色陷入圆周运动无法抵达目标点。
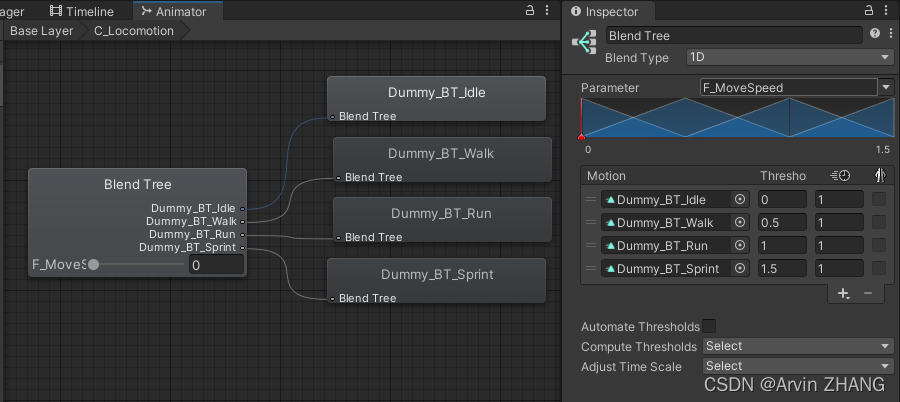
如果是不带RootMotion的角色,需要避免角色滑步,将角色的导航移动速度换算成动画状态机的运动BlendTree控制参数即可,例如 animator.SetFloat("LocomotionSpeed", agent.velocity.magnitude/maxLocomotionSpeed) ,这里可能会有更复杂的换算公式,具体取决于BlendTree形式和其参数。
一些额外的值得关注的点:① NavMeshAgent控制角色转向的速度非常慢,即使将AngualrSpeed设置为很大的值也依然很慢,可以禁用NavMeshAgent组件的旋转更新(agent.updateRotation = false),并自行控制角色旋转(建议不要使用Lerp和SLerp,他们在向背面旋转时效果不好);② 如果某一帧时NavMeshAgent组件处于stop状态((不确定是Unity改了还是之前测试错了,2020LTS没这个问题了)。agent.isStopped == true),将其取消stop要等到下一帧才能生效,当帧为其设置目标点不会使导航生效
主要代码:
这段示例代码中,只处理了动画向前移动的单向BlendTree(Idle、Walk、Run),没有处理复杂多方向BlendTree。
using System;
using System.Collections.Generic;
using System.Linq;
using UnityEngine;
using UnityEngine.AI;
#if UNITY_EDITOR
using UnityEditor;
#endif
public enum RemainingDistanceType
{
/// <summary>
/// 如果角色指定了目的地,此模式代表角色位置到目的地之间的距离。
/// 如果角色指定了移动路径,此模式代表角色位置到移动路径终点之间的距离。
/// </summary>
PathEnd,
/// <summary>
/// 如果角色指定了目的地,此模式代表角色位置到目的地之间的距离。
/// 如果角色指定了移动路径,此模式代表角色位置到下一个路径点之间的距离。
/// </summary>
WayPoint,
/// <summary>
/// 角色位置到下一个转向点之间的位置。
/// 转向点可能是移动轨迹中的任意位置,不一定是给定的路径中的路径点。
/// </summary>
SteeringPoint
}
[DisallowMultipleComponent]
[RequireComponent(typeof(Animator))]
[RequireComponent(typeof(NavMeshAgent))]
public class RootMotionNavMeshAgent : MonoBehaviour
{
/// <summary>
/// 若角色当前朝向与目标朝向之间的夹角小于此角度,则使角色停止转向。
/// </summary>
public const float RotateStopAngle = 1f;
/// <summary>
/// 设置是否激活组件。
/// </summary>
public bool Enabled
{
get
{
return enabled;
}
set
{
if (enabled && value == false)
{
StopMoving();
}
enabled = value;
}
}
/// <summary>
/// 目标朝向。
/// </summary>
public Vector3? TargetForward { get; private set; }
/// <summary>
/// 目的地。
/// </summary>
public Vector3? Destination { get; private set; }
/// <summary>
/// 导航路径点(由 <see cref="NavMeshAgent"/> 计算得出)。
/// </summary>
public IEnumerable<Vector3> NavPathCorners { get { return _navMeshAgent.path.corners; } }
/// <summary>
/// 移动路径点(由外部指定)。
/// </summary>
public IEnumerable<Vector3> MovingPath { get { return _movingPath; } }
/// <summary>
/// 转身速度(角度/秒)。
/// </summary>
public float AngularSpeed
{
get { return _navMeshAgent.angularSpeed; }
set { _navMeshAgent.angularSpeed = value; }
}
/// <summary>
/// 若角色当前位置与目的地的距离(<see cref="GetRemainingLinearDistance"/>)小于此值(米),则视为到达目的地,使角色停止移动。
/// </summary>
public float StoppingDistance
{
get { return _navMeshAgent.stoppingDistance; }
set { _navMeshAgent.stoppingDistance = value; }
}
/// <summary>
/// 若角色当前位置与目的地的距离(<see cref="GetRemainingLinearDistance"/>)小于此值(米),则视为接近目标点,使角色开始减速。
/// 若沿给定路径点移动,则在接近目标点时,使角色开始向路径中的下一个目标点移动。
/// </summary>
public float ApproachDistance
{
get { return _approachDistance; }
set { _approachDistance = value; }
}
/// <summary>
/// 控制角色移动的动画参数名称。
/// </summary>
public string AnimationLocomotionParam
{
get { return _animationLocomotionParam; }
set
{
_animationLocomotionParam = value;
_animationLocomotionParamHash = Animator.StringToHash(_animationLocomotionParam);
}
}
/// <summary>
/// 使角色原地站立的动画参数值。
/// </summary>
public float AnimationStandingValue
{
get { return _animationStandingValue; }
set { _animationStandingValue = value; }
}
/// <summary>
/// 使角色向前移动的动画参数值。
/// </summary>
public float AnimationMovingValue
{
get { return _animationMovingValue; }
set { _animationMovingValue = value; }
}
/// <summary>
/// 使角色向前移动的动画参数最小值。
/// </summary>
public float AnimationMovingMinValue
{
get { return _animationMovingMinValue; }
set { _animationMovingMinValue = value; }
}
/// <summary>
/// 角色移动动画参数的Damp时长(秒)。
/// </summary>
public float AnimationLocomotionValueDampTime
{
get { return _animationLocomotionValueDampTime; }
set { _animationLocomotionValueDampTime = value; }
}
/// <summary>
/// 根据给定点在NavMesh上采样位置时,可以使用的最大偏移距离(米)。
/// </summary>
public float MaxNavMeshSampleDistance
{
get { return _maxNavMeshSampleDistance; }
set { _maxNavMeshSampleDistance = value; }
}
/// <summary>
/// 在NavMesh上采样位置时,使用的区域遮罩。
/// </summary>
public int NavMeshAreaMask
{
get { return _navMeshAreaMask; }
set { _navMeshAreaMask = value; }
}
/// <summary>
/// 控制角色移动的动画参数名称。
/// </summary>
[SerializeField]
private string _animationLocomotionParam = "F_MoveSpeed";
/// <summary>
/// 使角色原地站立的动画参数值。
/// </summary>
[SerializeField]
private float _animationStandingValue = 0.0f;
/// <summary>
/// 使角色向前移动的动画参数值。
/// </summary>
[SerializeField]
private float _animationMovingValue = 1.0f;
/// <summary>
/// 使角色向前移动的动画参数最小值。
/// </summary>
[SerializeField]
private float _animationMovingMinValue = 0.3f;
/// <summary>
/// 角色移动动画参数的Damp时长(秒)。
/// </summary>
[Range(0f, 0.5f)]
[SerializeField]
private float _animationLocomotionValueDampTime = 0.1f;
/// <summary>
/// 根据给定点在NavMesh上采样位置时,可以使用的最大偏移距离(米)。
/// </summary>
[SerializeField]
private float _maxNavMeshSampleDistance = 0.5f;
/// <summary>
/// 在NavMesh上采样位置时,使用的区域遮罩。
/// </summary>
[SerializeField]
private int _navMeshAreaMask = NavMesh.AllAreas;
/// <summary>
/// 若角色当前位置与目的地的距离(<see cref="GetRemainingLinearDistance"/>)小于此值(米),则视为接近目标点,使角色开始减速。
/// 若沿给定路径点移动,则在接近目标点时,使角色开始向路径中的下一个目标点移动。
/// </summary>
[SerializeField]
private float _approachDistance = 0.8f;
/// <summary>
/// 动画机。
/// </summary>
private Animator _animator;
/// <summary>
/// 导航代理。
/// </summary>
private NavMeshAgent _navMeshAgent;
/// <summary>
/// 移动路径点(由外部指定)。
/// </summary>
private readonly Queue<Vector3> _movingPath = new Queue<Vector3>();
/// <summary>
/// 转向停止时的回调。
/// 参数1:是否已转到目标方向。
/// </summary>
private Action<bool> _rotateStopCallback;
/// <summary>
/// 移动停止时的回调。
/// 参数1:是否抵达目的地。
/// </summary>
private Action<bool> _moveStopCallback;
/// <summary>
/// 控制角色移动的动画参数Hash。
/// </summary>
private int _animationLocomotionParamHash;
/// <summary>
/// 动画机移动参数值。
/// </summary>
private float _animationLocomotionValue;
/// <summary>
/// 动画机移动参数值Damp辅助字段。
/// </summary>
private float _animationLocomotionValueDampVelocity;
// 测试代码
//[SerializeField]
//private List<Vector3> _pathBuffer = new List<Vector3>();
/// <summary>
/// 设置角色朝向。
/// </summary>
/// <param name="forward">目标朝向。</param>
/// <param name="stopMoving">是否停止正在进行的导航。</param>
/// <param name="onRotateStop">转向停止时的回调,参数1:是否已转到目标方向。</param>
/// <returns></returns>
public bool SetForward(Vector3 forward, bool stopMoving = false, Action<bool> onRotateStop = null)
{
StopRotating();
forward.y = 0;
if (forward.sqrMagnitude < Mathf.Epsilon)
{
Debug.LogError("ERROR: Can't set forward to zero.");
onRotateStop?.Invoke(true);
return false;
}
if (Destination.HasValue)
{
if (stopMoving)
{
StopMoving();
}
else
{
Debug.LogError("ERROR: Can't set forward during the navigation.");
onRotateStop?.Invoke(false);
return false;
}
}
TargetForward = forward.normalized;
_rotateStopCallback = onRotateStop;
return true;
}
/// <summary>
/// 设置目的地。
/// </summary>
/// <param name="destination">目的地。</param>
/// <param name="onMovingStop">导航停止时的回调,参数1:是否到达目的地。</param>
/// <returns></returns>
public bool SetDestination(Vector3 destination, Action<bool> onMovingStop = null)
{
StopMoving();
if (_navMeshAgent.SetDestination(destination))
{
// 注意不要直接使用 destination ,它可能不在NavMesh上
Destination = _navMeshAgent.destination;
_moveStopCallback = onMovingStop;
return true;
}
onMovingStop?.Invoke(false);
return false;
}
/// <summary>
/// 设置移动路径。
/// </summary>
/// <param name="wayPoints">移动路径。</param>
/// <param name="onMovingStop">导航停止时的回调,参数1:是否到达目的地。</param>
public void SetPath(IEnumerable<Vector3> wayPoints, Action<bool> onMovingStop = null)
{
StopMoving();
_movingPath.Clear();
foreach (var wayPoint in wayPoints)
{
_movingPath.Enqueue(wayPoint);
}
if (_movingPath.Count == 0)
{
onMovingStop?.Invoke(true);
return;
}
while (_movingPath.Count > 0)
{
Destination = _movingPath.Dequeue();
if (_navMeshAgent.SetDestination(Destination.Value))
{
Destination = _navMeshAgent.destination;
_moveStopCallback = onMovingStop;
return;
}
Debug.LogError($"ERROR: Skip unreachable moving path point `{Destination.Value}`.", gameObject);
}
Debug.LogError("ERROR: There is no reachable point in path.", gameObject);
// 所有路径点在导航网格上都不可达
Destination = null;
onMovingStop?.Invoke(false);
}
/// <summary>
/// 停止转向。
/// </summary>
public void StopRotating()
{
if (!TargetForward.HasValue)
{
return;
}
if (_rotateStopCallback == null)
{
//// 测试代码
//Debug.LogError(Vector3.Angle(transform.forward, TargetForward.Value) < RotateStopAngle ? "### 转向完成" : "### 转向中断");
TargetForward = null;
return;
}
var deflectionAngle = Vector3.Angle(transform.forward, TargetForward.Value);
var tempRotateStopCallback = _rotateStopCallback;
//// 测试代码
//Debug.LogError(deflectionAngle < RotateStopAngle ? "### 转向完成" : "### 转向中断");
_rotateStopCallback = null;
TargetForward = null;
tempRotateStopCallback(deflectionAngle < RotateStopAngle);
}
/// <summary>
/// 停止移动。
/// </summary>
public void StopMoving()
{
if (!Destination.HasValue)
{
return;
}
if (_moveStopCallback == null)
{
//// 测试代码
//if (GetRemainingLinearSqrDistance(RemainingDistanceType.PathEnd) > StoppingDistance * StoppingDistance)
//{
// Debug.LogError("### NavStop: 未到达");
//}
//else
//{
// Debug.LogError("### NavStop: 到达");
//}
Destination = null;
_movingPath.Clear();
_navMeshAgent.ResetPath();
return;
}
var tempNavStopCallback = _moveStopCallback;
_moveStopCallback = null;
_navMeshAgent.ResetPath();
if (GetRemainingLinearSqrDistance(RemainingDistanceType.PathEnd) > StoppingDistance * StoppingDistance)
{
//// 测试代码
//Debug.LogError("### NavStop: 未到达");
Destination = null;
_movingPath.Clear();
tempNavStopCallback(false);
}
else
{
//// 测试代码
//Debug.LogError("### NavStop: 到达");
Destination = null;
_movingPath.Clear();
tempNavStopCallback(true);
}
}
/// <summary>
/// 移动角色位置。
/// 若角色尚未停止移动动画,则需要在 LateUpdate 方法中调用此方法。
/// </summary>
/// <param name="targetPosition">角色目标位置。</param>
/// <param name="stopMoving">是否停止正在进行的导航。</param>
/// <returns></returns>
public bool MoveCharacter(Vector3 targetPosition, bool stopMoving = false)
{
if (NavMesh.SamplePosition(targetPosition, out var hit, MaxNavMeshSampleDistance, NavMeshAreaMask))
{
transform.position = hit.position;
// 这两个方法会导致NavMeshAgent被中途的障碍物挡住
//_navMeshAgent.nextPosition = hit.position;
//_navMeshAgent.Move(hit.position - transform.position);
if (stopMoving)
{
_navMeshAgent.Warp(hit.position);
StopMoving();
}
else if (Destination.HasValue)
{
// Warp方法会导致导航停止
_navMeshAgent.Warp(hit.position);
_navMeshAgent.SetDestination(Destination.Value);
}
return true;
}
return false;
}
/// <summary>
/// 获取角色当前所在位置到目的地的直线距离(米)。
/// 注意此方法返回的不是 <see cref="NavMeshAgent.remainingDistance"/> ,两者之间有误差。
/// </summary>
/// <param name="distanceType">计算剩余距离的方式。</param>
/// <returns></returns>
public float GetRemainingLinearDistance(RemainingDistanceType distanceType)
{
return Mathf.Sqrt(GetRemainingLinearSqrDistance(distanceType));
}
/// <summary>
/// 获取角色当前所在位置到目的地的直线距离(米)的平方。
/// 注意此方法返回的不是 <see cref="NavMeshAgent.remainingDistance"/> 的平方值,两者之间有误差。
/// </summary>
/// <param name="distanceType">计算剩余距离的方式。</param>
/// <returns></returns>
public float GetRemainingLinearSqrDistance(RemainingDistanceType distanceType)
{
if (Destination.HasValue)
{
switch (distanceType)
{
case RemainingDistanceType.PathEnd:
if (_movingPath.Count > 0)
{
return Vector3.SqrMagnitude(transform.position - _movingPath.Last());
}
else
{
return Vector3.SqrMagnitude(transform.position - Destination.Value);
}
case RemainingDistanceType.WayPoint:
return Vector3.SqrMagnitude(transform.position - Destination.Value);
case RemainingDistanceType.SteeringPoint:
return Vector3.SqrMagnitude(transform.position - _navMeshAgent.steeringTarget);
default:
throw new ArgumentOutOfRangeException(nameof(distanceType), distanceType, null);
}
}
return 0;
}
private void Reset()
{
_navMeshAgent = GetComponent<NavMeshAgent>();
if (ApproachDistance < StoppingDistance)
{
ApproachDistance = StoppingDistance + 1e-5f;
}
}
private void OnValidate()
{
if (Application.isPlaying)
{
_animationLocomotionParamHash = Animator.StringToHash(AnimationLocomotionParam);
}
if (AnimationMovingMinValue < AnimationStandingValue)
{
AnimationMovingMinValue = AnimationStandingValue;
}
_navMeshAgent = GetComponent<NavMeshAgent>();
if (ApproachDistance < StoppingDistance)
{
ApproachDistance = StoppingDistance + 1e-5f;
}
}
private void Awake()
{
_animator = GetComponent<Animator>();
_animationLocomotionParamHash = Animator.StringToHash(AnimationLocomotionParam);
_navMeshAgent = GetComponent<NavMeshAgent>();
_navMeshAgent.updatePosition = false;
_navMeshAgent.updateRotation = false; // 导航转身太慢,手动转身
if (ApproachDistance < StoppingDistance)
{
ApproachDistance = StoppingDistance + 1e-5f;
}
}
private void Update()
{
// 处理角色转向
RotateCharacter(out float deflectionAngle);
// 如果无目的地,停止移动
if (!Destination.HasValue)
{
SetAnimationLocomotionValueWithDamp(AnimationStandingValue);
return;
}
// 计算剩余距离
var remainingSqrDistance = GetRemainingLinearSqrDistance(RemainingDistanceType.WayPoint);
// 优先处理路径,因为路径也会使用 NavDestination 属性
if (_movingPath.Count > 0)
{
if (remainingSqrDistance < ApproachDistance * ApproachDistance)
{
var hasDestination = false;
while (_movingPath.Count > 0)
{
Destination = _movingPath.Dequeue();
if (_navMeshAgent.SetDestination(Destination.Value))
{
Destination = _navMeshAgent.destination;
hasDestination = true;
break;
}
Debug.LogError($"ERROR: Skip unreachable moving path point `{Destination.Value}`.");
}
// 所有路径点在导航网格上都不可达,停止导航
if (!hasDestination)
{
StopMoving();
return;
}
}
}
// 次优处理单个目的地
// 已到达目的地
else if (remainingSqrDistance < StoppingDistance * StoppingDistance)
{
StopMoving();
return;
}
// 处理转身速度衰减和接近目标点的速度衰减
var animationMovingValue = Mathf.Min(DampMovingSpeedByDeflection(AnimationMovingValue, deflectionAngle),
DampMovingSpeedByRemainingDistance());
//var animationMovingValue = DampMovingSpeedByDeflection(AnimationMovingValue, deflectionAngle);
// 设置移动参数
SetAnimationLocomotionValueWithDamp(animationMovingValue);
}
//// 测试代码
//private void LateUpdate()
//{
// if (Input.GetKey(KeyCode.LeftControl))
// {
// // 设置朝向
// if (Input.GetMouseButtonDown(0))
// {
// var ray = UnityEngine.Camera.main.ScreenPointToRay(Input.mousePosition);
// if (Physics.Raycast(ray, out var hit, 100, -1))
// {
// var forward = hit.point - transform.position;
// SetForward(forward, true);
// }
// }
// // 移动位置
// if (Input.GetMouseButtonDown(1))
// {
// var ray = UnityEngine.Camera.main.ScreenPointToRay(Input.mousePosition);
// if (Physics.Raycast(ray, out var hit, 100, -1))
// {
// MoveCharacter(hit.point);
// }
// }
// }
// else
// {
// // 设置目的地
// if (Input.GetMouseButtonDown(0))
// {
// var ray = UnityEngine.Camera.main.ScreenPointToRay(Input.mousePosition);
// if (Physics.Raycast(ray, out var hit, 100, -1))
// {
// SetDestination(hit.point);
// }
// }
// // 添加路径点
// if (Input.GetMouseButtonDown(1))
// {
// var ray = UnityEngine.Camera.main.ScreenPointToRay(Input.mousePosition);
// if (Physics.Raycast(ray, out var hit, 100, -1))
// {
// _pathBuffer.Add(hit.point);
// }
// }
// // 设置路径点
// if (Input.GetMouseButtonDown(2))
// {
// SetPath(_pathBuffer);
// _pathBuffer.Clear();
// }
// }
//}
private void OnAnimatorMove()
{
// 仅使用导航高度,使角色贴合导航网格
var pos = _animator.rootPosition;
pos.y = _navMeshAgent.nextPosition.y;
transform.position = pos;
// 使代理贴合根运动
_navMeshAgent.nextPosition = transform.position;
// 使用根运动速度驱动导航速度
_navMeshAgent.velocity = _animator.velocity;
}
/// <summary>
/// 处理角色转向。
/// </summary>
/// <param name="deflectionAngle"></param>
private void RotateCharacter(out float deflectionAngle)
{
deflectionAngle = 0;
// 若有目的地,则朝向下一个要到达的路径点
if (Destination.HasValue)
{
var targetForward = _navMeshAgent.steeringTarget - transform.position;
targetForward.y = 0;
targetForward.Normalize();
// 处理转身
transform.forward = Vector3.RotateTowards(transform.forward, targetForward,
Time.deltaTime * AngularSpeed * Mathf.Deg2Rad, float.MaxValue);
deflectionAngle = Vector3.Angle(transform.forward, targetForward);
}
// 否则朝向指定的方向
else if (TargetForward.HasValue)
{
// 处理转身
transform.forward = Vector3.RotateTowards(transform.forward, TargetForward.Value,
Time.deltaTime * AngularSpeed * Mathf.Deg2Rad, float.MaxValue);
deflectionAngle = Vector3.Angle(transform.forward, TargetForward.Value);
if (deflectionAngle < RotateStopAngle)
{
//// 测试代码
//Debug.LogError("### 转向完成");
if (_rotateStopCallback == null)
{
TargetForward = null;
}
else
{
var tempRotateStopCallback = _rotateStopCallback;
_rotateStopCallback = null;
TargetForward = null;
tempRotateStopCallback(true);
}
}
}
}
/// <summary>
/// 按角色当前朝向与目标移动方向的偏转角处理移动速率衰减。
/// </summary>
/// <param name="originalSpeed">衰减前的移动速率(米/秒)。</param>
/// <param name="deflectionAngle">偏转角(角度)。</param>
/// <returns></returns>
private float DampMovingSpeedByDeflection(float originalSpeed, float deflectionAngle)
{
deflectionAngle = Mathf.Abs(deflectionAngle);
// 立方EaseOutIn衰减
//var progress = 1 - deflectionAngle / 180;
//var dampCoef = progress < 0.5f
// ? progress * 2 - Mathf.Pow(2, 3 - 1) * Mathf.Pow(progress, 3) // 2^(n-1)*(progress^n)
// : progress * 2 - (1 - Mathf.Pow(-2 * progress + 2, 3) / 2); // 1-((-2*x+2)^n)/2
// 线性衰减
var dampCoef = 1 - deflectionAngle / 180;
var dampedSpeed = originalSpeed * dampCoef;
return dampedSpeed;
}
/// <summary>
/// 按角色当前距离导航目标点的距离来处理移动速率衰减。
/// </summary>
/// <returns></returns>
private float DampMovingSpeedByRemainingDistance()
{
if (ApproachDistance < StoppingDistance)
{
Debug.LogError($"ERROR: {nameof(StoppingDistance)}({StoppingDistance}) should be less than {nameof(ApproachDistance)}({ApproachDistance}).", gameObject);
}
// 注意,应该根据角色移动速度来调整各项速度计算参数
var remainingSqrDistance = GetRemainingLinearSqrDistance(RemainingDistanceType.WayPoint);
if (remainingSqrDistance < StoppingDistance * StoppingDistance)
{
return 0;
}
if (remainingSqrDistance > ApproachDistance * ApproachDistance)
{
return AnimationMovingValue;
}
// 只在接近终点或者中途路径点时进行减速,由导航生成的steeringTarget不做减少处理(因为走过头了也没啥影响)
// 四次方EaseOutIn衰减
var remainingDistance = Mathf.Sqrt(remainingSqrDistance);
var progress = remainingDistance / ApproachDistance;
var dampCoef = progress < 0.5f
? progress * 2 - Mathf.Pow(2, 4 - 1) * Mathf.Pow(progress, 4) // 2^(n-1)*(progress^n)
: progress * 2 - (1 - Mathf.Pow(-2 * progress + 2, 4) / 2); // 1-((-2*x+2)^n)/2
// 线性衰减
//var dampCoef = remainingDistance / approachDistance;
// 避免接近目标点时无限减速
var dampedSpeed = Mathf.Max(AnimationMovingValue * dampCoef, AnimationMovingMinValue);
return dampedSpeed;
}
/// <summary>
/// 以带有Damp的形式设置动画的移动参数。
/// 需要每帧调用才能使Damp生效。
/// </summary>
/// <param name="value"></param>
private void SetAnimationLocomotionValueWithDamp(float value)
{
_animationLocomotionValue = Mathf.SmoothDamp(_animationLocomotionValue, value,
ref _animationLocomotionValueDampVelocity, AnimationLocomotionValueDampTime);
_animator.SetFloat(_animationLocomotionParamHash, _animationLocomotionValue);
}
}
#if UNITY_EDITOR
[CustomEditor(typeof(RootMotionNavMeshAgent))]
internal class RootMotionNavMeshAgentEditor : UnityEditor.Editor
{
/// <summary>
/// 是否开始调试模式。
/// </summary>
private static bool _debugModeEnabled;
/// <summary>
/// 绘制Gizmos。
/// </summary>
/// <param name="target"></param>
/// <param name="gizmoType"></param>
[DrawGizmo(GizmoType.Active | GizmoType.Selected)]
public static void DrawGizmos(RootMotionNavMeshAgent target, GizmoType gizmoType)
{
if (!_debugModeEnabled)
{
return;
}
// 当前导航状态
if (target.Destination.HasValue)
{
Gizmos.color = Color.green;
var navWayPoint = target.transform.position;
foreach (var pathCorner in target.NavPathCorners)
{
Gizmos.DrawSphere(pathCorner, 0.1f);
Debug.DrawLine(navWayPoint, pathCorner, Color.green, Time.deltaTime, false);
navWayPoint = pathCorner;
}
}
// 移动路径
var movingPath = (Queue<Vector3>)target.MovingPath;
if (movingPath.Count > 0 && target.Destination.HasValue)
{
Gizmos.color = Color.white;
var pathWayPoint = target.Destination.Value;
Gizmos.DrawSphere(pathWayPoint, 0.1f);
foreach (var wayPoint in movingPath)
{
Gizmos.DrawSphere(wayPoint, 0.1f);
Debug.DrawLine(pathWayPoint, wayPoint, Color.white, Time.deltaTime, false);
pathWayPoint = wayPoint;
}
}
}
public override void OnInspectorGUI()
{
base.OnInspectorGUI();
#region 调试开关
EditorGUILayout.Space();
var originalGUIBgColor = GUI.backgroundColor;
if (_debugModeEnabled)
{
GUI.backgroundColor = Color.yellow;
}
if (GUILayout.Button("调试模式"))
{
_debugModeEnabled = !_debugModeEnabled;
}
GUI.backgroundColor = originalGUIBgColor;
#endregion
}
}
#endif

Agent 垂直技术社区,欢迎活跃、内容共建。
更多推荐
 11
11 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)